题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
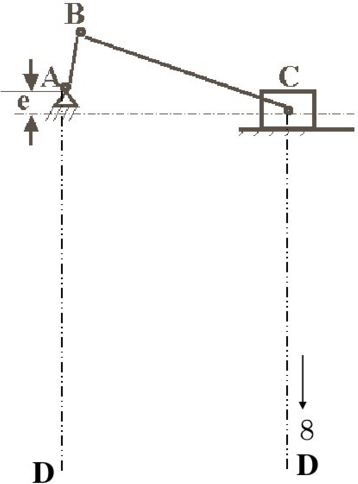
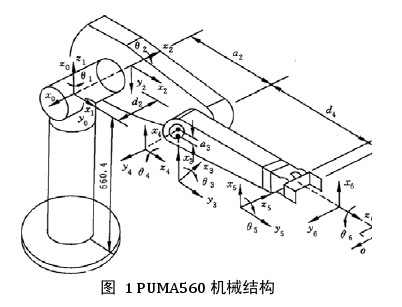
下图所示为PuMA560机器人的操作机的轴测简图,已知其结构尺寸及运动关节参数如图。试绘制该机器人操作机的机
构运动简图,并列出其操作机的运动学方程。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
构运动简图,并列出其操作机的运动学方程。
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为PuMA560机器人的操作机的轴测简图,已知其结构…”相关的问题
更多“下图所示为PuMA560机器人的操作机的轴测简图,已知其结构…”相关的问题
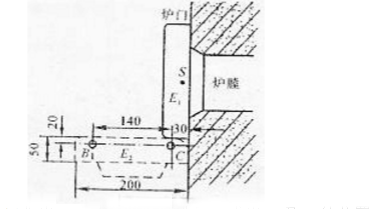
下图所示为一实验用小电炉的炉门装置.在关闭时为位置E1,开启时为位置E2,设计一四杆机构来操作炉门的肩闭(各有关尺寸见图)。在开启时炉门应向外开启,炉门与炉体不得发生干涉。而在关闭时,炉门应有一个自动压向炉体的趋势(图中S为炉门质心位置),B、C为两活动铰链所在位置。
电路如下图所示,D为理想二极管,ui=6sinωt(V),则输出电压的最大值U0m。为 ()V。
.jpg)
A.6
B.3
C.-3
D.-6
如下图所示,直径为D=2m,长为B=2m的圆柱形闸门挡水,水深2m,圆柱体所受水的压力为()kN。
.jpg)
A.40
B.50
C.60
D.70
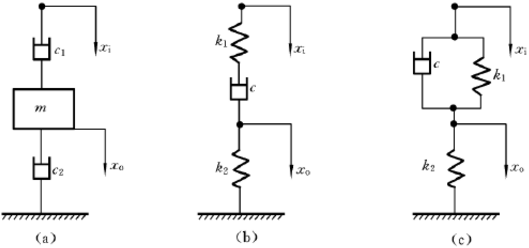
试求下图所示机械系统的微分方程式和传递函数。图中位移xi为输入量,位移xo为输出量,k为弹性系数,B、B1、B2为粘性阻尼系数。







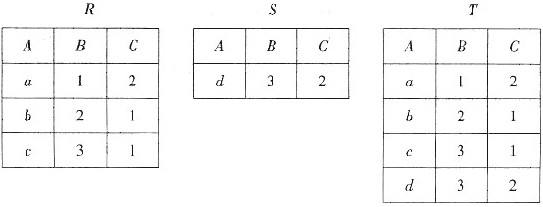 其中关系T由关系R和S通过某种操作得到,该操作为()。
其中关系T由关系R和S通过某种操作得到,该操作为()。


.jpg)