题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
传感器是物联网的基础,处于物联网架构的a) 感知层 B 传输层 C 控制层 D 应用层
传感器是物联网的基础,处于物联网架构的
a) 感知层 B 传输层 C 控制层 D 应用层
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
传感器是物联网的基础,处于物联网架构的
a) 感知层 B 传输层 C 控制层 D 应用层
如果结果不匹配,请 联系老师 获取答案
 更多“传感器是物联网的基础,处于物联网架构的a) 感知层 B 传输…”相关的问题
更多“传感器是物联网的基础,处于物联网架构的a) 感知层 B 传输…”相关的问题
A.物联网就是物物相连的互联网。
B.物联网的实践最早可以追溯到1980年施乐公司的网络可乐贩售机。
C.RFID(射频识别技术),也称电子标签。
D.感知层由各种传感器以及传感器网关构成。
48 .关于清除进入人体尚未吸收的毒物,下列不正确的是
A .患者处于昏迷、惊原状态,吞服石油蒸馏物、腐蚀剂不应催吐
B .食道静脉曲张患者不宜洗胃
C .洗胃液每次注入不宜超过 25Oml ,以免促使毒物进入肠内
D .导泻时,常使用油类泻药,以利于各种毒物排出
E .毒物溅入眼内,应立即用清水彻底冲洗
当物系处于泡、露点之间时,体系处于( )。
a.饱和液相;b.过热蒸汽;c.饱和蒸汽;d.汽液两相。
处于原长,m静止,而M以v=√{(6Mmg^2μ^2)/[k(M+m)]}的速度拉伸弹簧。试求:当弹簧达最大拉伸时的伸长量(设M>m)。
A.WBS是项目各项计划和控制措施制定的基础和主要依据
B.WBS是面向可交付物的层次型结构
C.WBS可以不包括分包出去的工作
D.WBS能明确项目相关各方面的工作界面,便于责任划分和落实
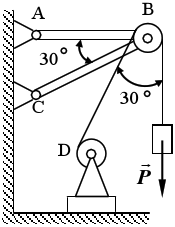
AB与CB杆自重及摩擦略去不计,A,B,C三处均为铰链连接。当物体处于平衡状态时,求拉杆AB和支杆CB所受的力。
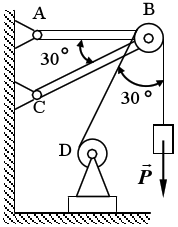
物体重P=20kN,用绳子挂在支架的滑轮B上,绳子的另一端接在绞车D上,如图2-10所示。转动绞车,物体便能升起。设滑轮的大小、AB与CB杆自重及摩擦略去不计,A、B、C三处均为铰链连接。当物体处于平衡状态时,求拉杆AB和CB支杆所受的力。