

 如果结果不匹配,请
如果结果不匹配,请 
 更多“已知最小相位系统的开环对数幅频特性如图所示,试求:”相关的问题
更多“已知最小相位系统的开环对数幅频特性如图所示,试求:”相关的问题
第1题
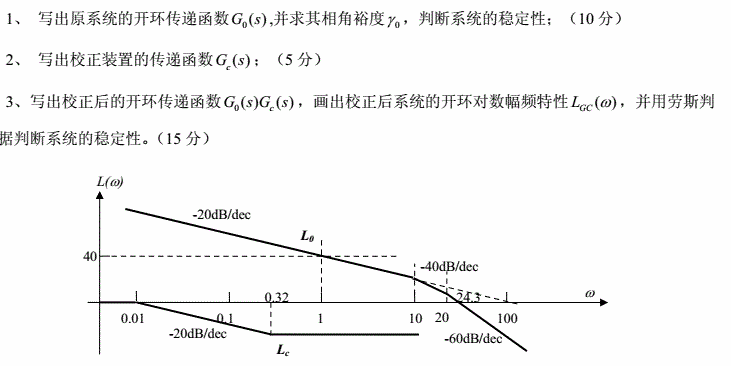
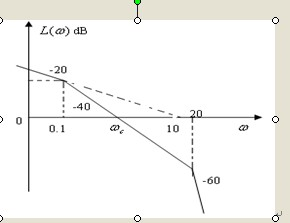
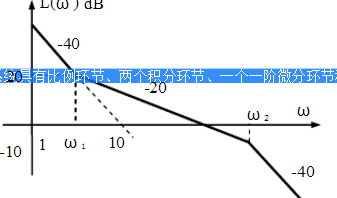
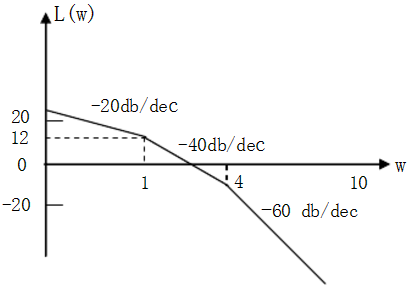
已知最小相位系统的对数幅频特性如图5-14所示。求列写系统的开环传递函数,并求出开环放大系数K与各频率间的
已知最小相位系统的对数幅频特性如图5-14所示。求列写系统的开环传递函数,并求出开环放大系数K与各频率间的关系。
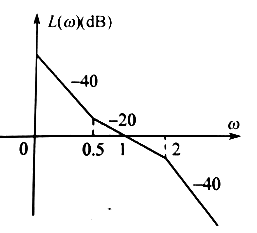
 试绘制系统开环对数幅频渐近特性曲线。
试绘制系统开环对数幅频渐近特性曲线。第6题
已知系统开环传递函数,试设计PID校正装置,使系统的速度误差系数Kv≥10,相位裕量γ≥50°,且幅值穿越频率ωc≥4rad
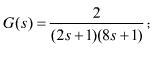
已知系统开环传递函数
第7题
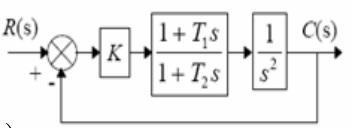
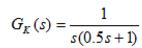
已知单位反馈系统结构图如图6-30所示,其中K为前向增益,为超前校正装置,T1>T2,试用频率法确定使系统具有最大
已知单位反馈系统结构图如图6-30所示,其中K为前向增益,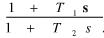 为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
第8题
已知单位反馈系统的开环传递函数为 现要求速度误差系数Kv=20s-1相位裕度不小于45°,增益裕度不小于10dB,
已知单位反馈系统的开环传递函数为
 现要求速度误差系数Kv=20s-1相位裕度不小于45°,增益裕度不小于10dB,试确定校正装置的传递函数。
现要求速度误差系数Kv=20s-1相位裕度不小于45°,增益裕度不小于10dB,试确定校正装置的传递函数。
第9题
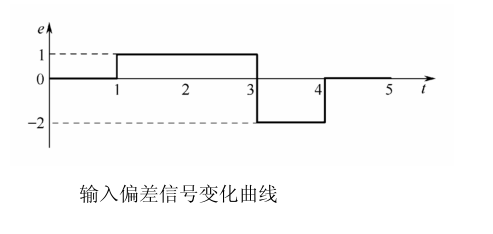
对一台比例积分控制器做开环试验。已知KP=2,T1=0.5min。若输入偏差信号如图5-1所示,试画出该控制器的输出信号变
对一台比例积分控制器做开环试验。已知KP=2,T1=0.5min。若输入偏差信号如图5-1所示,试画出该控制器的输出信号变化曲线。
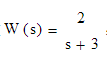 ,试求系统的相位裕量γ和幅值裕量Kg。
,试求系统的相位裕量γ和幅值裕量Kg。第11题
设一单位负反馈系统的开环传递函数为,试确定a值,使系统的相位稳定裕度等于45°。
设一单位负反馈系统的开环传递函数为G(s)=(as+1)/s²,试确定a值,使系统的相位稳定裕度等于45°。
















