 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
(1)设A是对称矩阵,λ和x(‖x‖2=1)是A的一个特征值及相应的特征向量.又设P为一个正交阵,使 Px=e1=(1,0,…,0)T.证明B=PAPT的第一行和第一列除了λ外其余元素均为零. (2)对于矩阵
(1)设A是对称矩阵,λ和x(‖x‖2=1)是A的一个特征值及相应的特征向量.又设P为一个正交阵,使 Px=e1=(1,0,…,0)T.证明B=PAPT的第一行和第一列除了λ外其余元素均为零. (2)对于矩阵 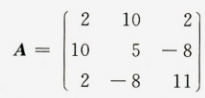 λ=9是其特征值,
λ=9是其特征值,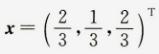 是相应于9的特征向量,试求一初等反射阵P,使Px=e1并计算B=PAPT.
是相应于9的特征向量,试求一初等反射阵P,使Px=e1并计算B=PAPT.
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“(1)设A是对称矩阵,λ和x(‖x‖2=1)是A的一个特征值…”相关的问题
更多“(1)设A是对称矩阵,λ和x(‖x‖2=1)是A的一个特征值…”相关的问题
 A为对称正定矩阵.设从点x(k)出发,用最速下降法求后继点x(k+1).证明:
A为对称正定矩阵.设从点x(k)出发,用最速下降法求后继点x(k+1).证明:


 式中,u为输入量;x为输出量。
式中,u为输入量;x为输出量。 试列写动态方程;
试列写动态方程; 试确定变换矩阵T及变换后的动态方程。
试确定变换矩阵T及变换后的动态方程。















