题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
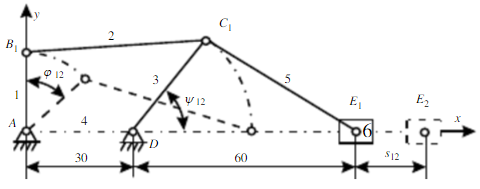
试设计如图所示的六杆机构。该机构当原动件1自γ轴顺时针转过φ12=60°时,构件3顺时针转过φ12=45°恰与x轴重合。
此时滑块6自E1移动到E2,位移S12=20mm。试确定铰链B及C的位置。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
此时滑块6自E1移动到E2,位移S12=20mm。试确定铰链B及C的位置。
如果结果不匹配,请 联系老师 获取答案
 更多“试设计如图所示的六杆机构。该机构当原动件1自γ轴顺时针转过φ…”相关的问题
更多“试设计如图所示的六杆机构。该机构当原动件1自γ轴顺时针转过φ…”相关的问题
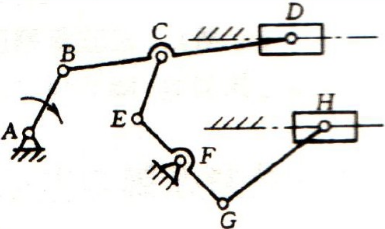
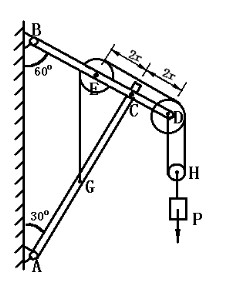
图所示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。又如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前有所不同。
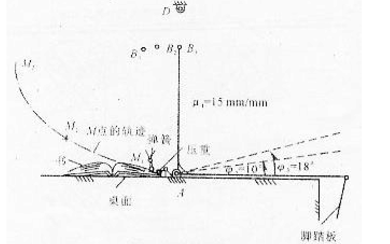
现欲设计一四杆机构翻书器。如图所示,当踩动脚踏板时,连杆上的M点自M1移至M2,就可翻过一页书。现已知固定铰链A、D的位置,连架杆AB的长度及三个位置,以及描点M的三个位置。试设计该四杆机构(压重用以保证每次翻书时只翻过一页)。
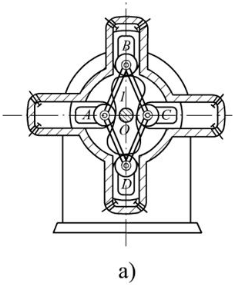
如题图所示为香皂包装机中所使用的凸轮—连杆组合机构。凸轮1-1'为原动件,从M点输出复杂轨迹。试分析该机构的组合方式,并画出其组合方式的运动框图。

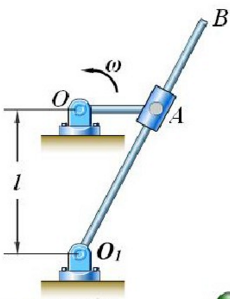
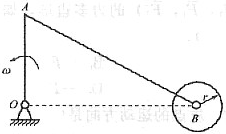
平面机构如图所示。已知:曲柄以匀角速度ω绕O轴转动,OA=r,AB=4r。在图示位置时,OA⊥OB,套筒C恰位于AB杆的中点。试求该瞬时CD杆的速度。
绘制图所示凸轮驱动式四缸活塞空气压缩机的机构运动简图,并计算其机构的自由度(图中凸轮1为原动件,当其转动时,分别推动装于四个活塞上A、B、C、D处的滚子,使活塞在相应的气缸内往复运动。又图中四个连杆的长度相等,即 。
。
座,已知P=10kN,q=5kN/m,M=30kN·m,梁的尺寸如图所示,单位为m,各杆件自重不计。试求A,C及E处的约束反力。
始终接触凸轮表面。该凸轮半径为R,偏心距OC=e,凸轮绕轴O转动的角速度为ω,OC与水平线成夹角φ。求当φ=0°时,顶杆的速度。

偏心凸轮机构,如图所示。若应用点的复合运动分析方法,取偏心凸轮上A1点为动点,动坐标系固连于AB杆,则动点的相对运动是沿轮廓线的圆周运动。( )
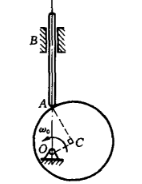
曲柄摆杆机构如图所示。曲柄OA=r,以匀角速度ωO绕O轴转动,通过套筒A带动摆杆O1B绕O1轴转动。在图示位置时,∠OAO1=30°。试求此瞬时O1B杆的角速度和角加速度(大小、转向)。