 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
把一个力传感器作为二阶系统处理。已知传感器的固有频率为800Hz,阻尼比为0.14,灵敏度为1。问使用该传感器作频
率为400Hz的正弦变化的外力测试时,其振幅和相位角各为多少?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
率为400Hz的正弦变化的外力测试时,其振幅和相位角各为多少?
如果结果不匹配,请 联系老师 获取答案
 更多“把一个力传感器作为二阶系统处理。已知传感器的固有频率为800…”相关的问题
更多“把一个力传感器作为二阶系统处理。已知传感器的固有频率为800…”相关的问题
已知机械系统在输入力作用下变形的传递函数为2/(s+1)(mm/kg),求系统的动刚度、动柔度和静刚度。
已知F1、F2、F3、F4为作用于刚体上的平面汇交力系,其力矢关系如图4-6所示为平行四边形。由此可知()。
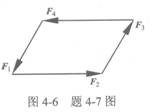
A.力系可合成为一个力偶
B.力系可合成为一个力
C.力系简化为一个力和一个力偶
D.力系合力为零,力系平衡
 A.力系可合成为一个力偶 B.力系可合成为一个力 C.力系简化为一个力和一力偶 D.力系的合力为零,力系平衡
A.力系可合成为一个力偶 B.力系可合成为一个力 C.力系简化为一个力和一力偶 D.力系的合力为零,力系平衡
已知函数f(x)在区间(1-δ,1+δ)内具有二阶导数,f〞(x)<0,且f(1)=fˊ(1)=1,则().
A.在(1-δ,1)和(1,1+δ)内均有f(x)<x
B.在(1-δ,1)和(1,1+δ)内均有f(x)>x
C.在(1-δ,1)内f(x)<x,在(1,1+δ)内f(x)>x
D.在(1-δ,1)内f(x)>x,在(1,1+δ)内f(x)<x
链表题:一个链表的结点结构
struct Node
{
int data ;
Node *next ;
};
typedef struct Node Node ;
(1)已知链表的头结点head,写一个函数把这个链表
逆序(Intel)
如图(a)所示构架由三根杆子和一个滑轮铰接而成。在AB杆的下端B作用一水平力F,跨过滑轮H的绳索上挂一重量为G的重物。已知:G=F=5kN,滑轮半径为R=20cm,杆、滑轮和绳索的重量均不计,AD=DC=CB=HD=a=50cm,α=45°。求CE杆作用于销钉K的力(A点为铰接)。

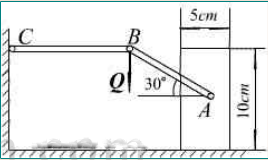
中心。已知杆BC水平,长方体与水平面间的静摩擦系数为f=0.52。各杆重及铰链处摩擦均忽略不计,尺寸如图所示。试确定不致破坏系统平衡时Q力的最大值。
已知类 Sample中的一个成员函数说明如下: void Set (Sample &a); 其中,Sample&a的含意是()。
A.指向类Sample 的指针为a
B.将a的地址值赋给变量Set
C.a是类Smple的对象引用,用来作函数Set() 形参
D.变量Sample与a按位相与作为函数Set()的参数
A.1 019 025 000
B.1 637 718 750
C.1 965 262 500
D.2 358 315 000
现代医学模式的重要性主要体现在
A.强调以疾病为中心
B.强调以治疗手段为中心
C.强调把人作为一个整体
D.强调以服务为中心
E.强调以心理治疗为中心







 ,利用电荷守恒定律
,利用电荷守恒定律









