 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如下图所示,已知AB的坐标方位角αAB=15°36'27",水平角值:β1=49°54'56"β2=203°27'36&q
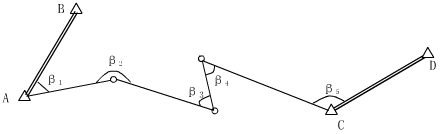
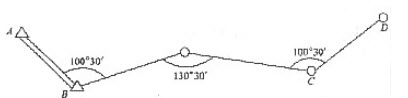
如下图所示,已知AB的坐标方位角αAB=15°36'27",水平角值:β1=49°54'56"β2=203°27'36" β3=82°38'14" β4=62°47'52" β5=114°48'25",试求CD边的坐标方位角αCD
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如下图所示,已知AB的坐标方位角αAB=15°36'27",水平角值:β1=49°54'56"β2=203°27'36" β3=82°38'14" β4=62°47'52" β5=114°48'25",试求CD边的坐标方位角αCD
如果结果不匹配,请 联系老师 获取答案
 更多“如下图所示,已知AB的坐标方位角αAB=15°36'…”相关的问题
更多“如下图所示,已知AB的坐标方位角αAB=15°36'…”相关的问题
平面机构如下图所示,已知:轮O在水平面上作纯滚动,r=10cm,h=30cm;在图示瞬时θ=30°,ωAB=3rad/s,αAB=0。试求此瞬时:

(1)轮O的角速度;(2)轮心的加速度;(3)轮O与地面接触点的加速度。
一图根附合导线如图所示,已知控制点B、C的坐标为(XB=8865.810m,YB=5055.340m)、(XC=9048.030m,YC=4559.940m)、AB边、CD边的坐标方位角分别为αAB=236°56'08"、αCD=266°03'12"。观测数据列于表中,试在表中平差计算各导线点的坐标。
| 点 号 | 水平角(左角) | 坐标方位角 | 边长D/m | 坐标增量 | 改正坐标增量 | 坐 标 | ||||
| 观测角 | 改正角 | △X/m | △Y/m | △X'/m | △Y'/m | X/m | Y/m | |||
| A | ||||||||||
| 236°56'08" | ||||||||||
| B | 261°07'50" | 8865.810 | 5055.340 | |||||||
| 156.136 | ||||||||||
| 1 | 174°45'20" | |||||||||
| 133.062 | ||||||||||
| 2 | 143°47'40" | |||||||||
| 155.635 | ||||||||||
| 3 | 156°22'47" | 9048.030 | 4559.940 | |||||||
| 145.141 | ||||||||||
| C | 193°02'30" | |||||||||
| 266°03'12" | ||||||||||
| D | ||||||||||
| ∑ | ||||||||||
| 辅 助 计 算 | ||||||||||
1.jpg)
A.2.jpg)
B.3.jpg)
C.4.jpg)
D.5.jpg)
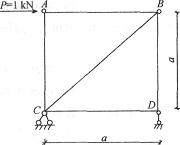
有一桁架,受力及支承如下图所示,则AC杆和AB杆的内力分别为()kN。(拉力为正,压力为负)
A.-1,-1
B.0,-1
C.1,1
D.1,0
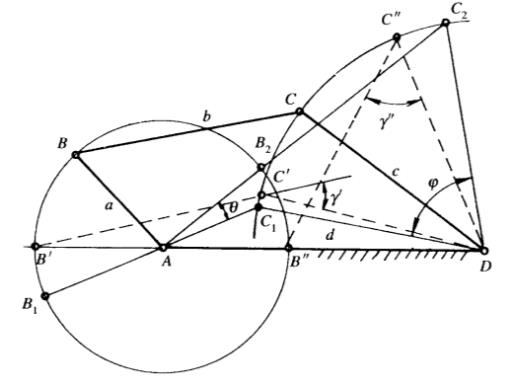
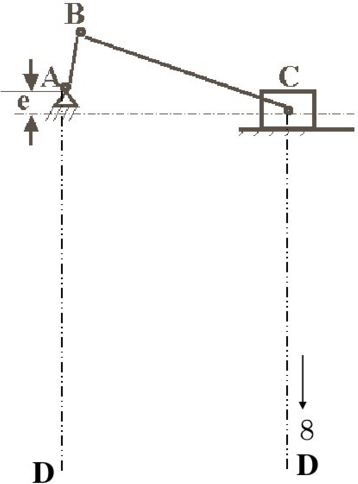
在下图所示铰链四杆机构中,已知各杆长度lAB=42mm,lBC=78mm,lCD=75mm,lAD=108mm。要求
(1) 试确定该机构为何种机构;
(2) 若以构件AB为原动件,试用作图法求出摇杆CD的最大摆角ϕ,
此机构的极位夹角θ,并确定行程速比系数K
(3) 若以构件AB为原动件,试用作图法求出该机构的最小传动角
γmin;
(4) 试分析此机构有无死点位置。
A.75°30'30"
B.45°30'30"
C.15°30'30"
D.25°29'30"
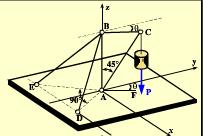
在图4-12所示起重机中,已知:AB=BC=AD=AE;点A、B、D和E等均为球铰链连接,如三角形ABC在xy平面的投影为AF线,AF与y轴夹角为α。求铅直支柱和各斜杆的内力。
A.(2072.113,1269.744)
B.(2287.843,1442.880)
C.(2287.843,1269.744)
D.(2072.113,1442.880)







1.jpg)
2.jpg)
3.jpg)
4.jpg)
5.jpg)










