题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
进程P0和进程P1的共享变量定义及其初值为:则并发执行进程P0和进程P1时产生的情况是()。A.不
进程P0和进程P1的共享变量定义及其初值为:则并发执行进程P0和进程P1时产生的情况是()。
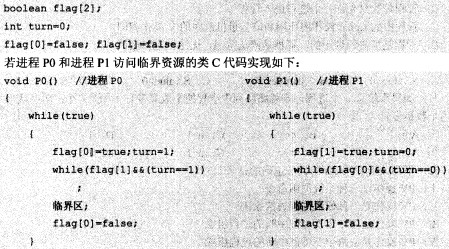
A.不能保证进程互斥进入临界区,会出现“饥饿”现象
B.不能保证进程互斥进入临界区,不会出现“饥饿”。现象
C.能保证进程互斥进入临界区,会出现“饥饿”现象
D.能保证进程互斥进入临界区,不会出现“饥饿”现象
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“进程P0和进程P1的共享变量定义及其初值为:则并发执行进程P…”相关的问题
更多“进程P0和进程P1的共享变量定义及其初值为:则并发执行进程P…”相关的问题
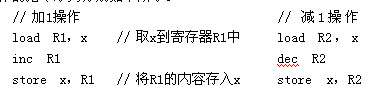 两个操作完成后,x的值
两个操作完成后,x的值
.jpg) 为此,应设信号量S1的初值为(18),信号量S2的初值为(19)。
为此,应设信号量S1的初值为(18),信号量S2的初值为(19)。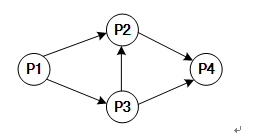
.jpg) 系统剩余资源量:1 如果在该状态下,进程P3申请1个资源分配后,系统的状态是
系统剩余资源量:1 如果在该状态下,进程P3申请1个资源分配后,系统的状态是