题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
若m是常矢量,证明除R=0点以外,矢量的旋度等于标量ψ=的梯度的负值,即 ×A=-ψ 其中R为坐标原点到场点的距离,
若m是常矢量,证明除R=0点以外,矢量
其中R为坐标原点到场点的距离,方向由原点指向场点。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
若m是常矢量,证明除R=0点以外,矢量
其中R为坐标原点到场点的距离,方向由原点指向场点。
如果结果不匹配,请 联系老师 获取答案
 更多“若m是常矢量,证明除R=0点以外,矢量的旋度等于标量ψ=的梯…”相关的问题
更多“若m是常矢量,证明除R=0点以外,矢量的旋度等于标量ψ=的梯…”相关的问题
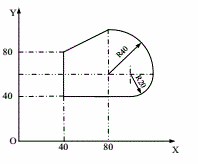
用φ10mm的立铣刀铣削工件轮廓,起刀点为(0,0),工件尺寸及加工路线如下图所示,试按相对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的X、Y、Z坐标值的地址符(主轴转速为600r/m,进给速度为150mm/min,机床具有刀具半径补偿功能)。
关于距离矢量的算法,以下说法错误的是______。
A.距离矢量算法不会产生路由环路问题
B.距离矢量算法是靠传递路由信息来实现的
C.路由信息的矢量表示法是(目标网络,metric)
D.使用距离矢量算法的协议只从自己的邻居获得信息
关于位移和路程,下列说法哪种正确 ()
A. 位移和路程的大小总相等;位移有方向,是矢量,路程无方向,是标量
B. 位移用来描述直线运动,路程用来描述曲线运动
C. 位移是矢量,取决于物体的始末位置;路程是标量,取决于物体实际通过的路线
D. 路程和位移是一回事
常用的压缩编码方法分为无损压缩和有损压缩,以下属于无损压缩法的是(30)。
A.矢量量化编码
B.子带编码
C.模型编码
D.哈夫曼编码
根据算符 的微分性与矢量性,推导下列公式:
的微分性与矢量性,推导下列公式:
(1)(A·B)=B×(×A)+(B·)A+A×(×B)+(A·)B;
(2)
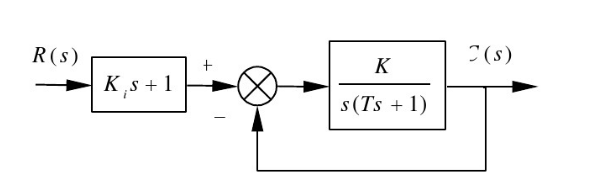
随动控制系统的方框图如图所示。若输入信号为r(t)=at(a为任意常数)。试证明通过适当地调节Ki的值,该系统对于斜坡输入的响应的稳态误差能达到零。
均质滚子,质量为m,半径为r,对中心轴(过质心)的迥转半径为ρ,如图所示。滚轴半径为r0,受到常力F的作用,从静止开始沿水平面作纯滚动。设力F与水平面夹角为θ,试求:滚子质心的加速度;滚子受到的滑动摩擦力;滚子保持纯滚动的条件。

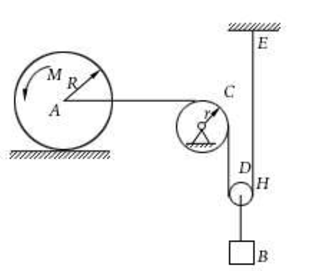
在图(a)中,已知作纯滚动的均质圆轮A重量为G1,半径为R,其上作用一力偶矩为M的常力偶;均质轮C重为G2,半径为r;重物B重量为G3。动滑轮D的质量、绳子质量及轴承摩擦不计,与轮A相连的绳子与水平面平行。试求(1)重物B上升的加速度;(2)EH段绳子拉力;(3)轮A与水平面接触处的摩擦力。