题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s),C(s)/N(s)。 (2)若要消除干扰对输出的影响,即C(s)/N(s
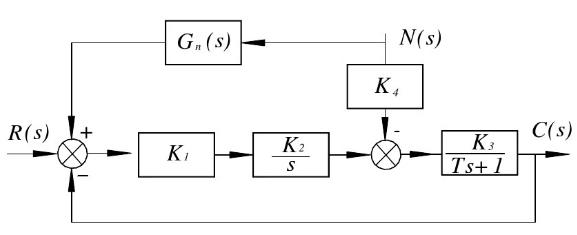
已知系统结构图如下图所示。
(1)求传递函数C(s)/R(s),C(s)/N(s)。
(2)若要消除干扰对输出的影响,即C(s)/N(s)=0,G0(s)=?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统结构图如下图所示。
(1)求传递函数C(s)/R(s),C(s)/N(s)。
(2)若要消除干扰对输出的影响,即C(s)/N(s)=0,G0(s)=?
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s…”相关的问题
更多“已知系统结构图如下图所示。 (1)求传递函数C(s)/R(s…”相关的问题
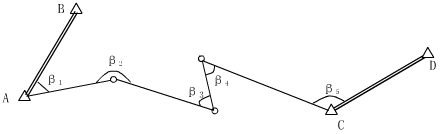
如下图所示,已知AB的坐标方位角αAB=15°36'27",水平角值:β1=49°54'56"β2=203°27'36" β3=82°38'14" β4=62°47'52" β5=114°48'25",试求CD边的坐标方位角αCD
平面机构如下图所示,已知:轮O在水平面上作纯滚动,r=10cm,h=30cm;在图示瞬时θ=30°,ωAB=3rad/s,αAB=0。试求此瞬时:

(1)轮O的角速度;(2)轮心的加速度;(3)轮O与地面接触点的加速度。
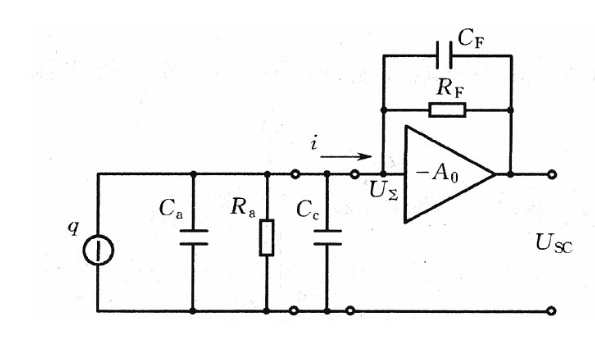
电荷前置放大器电路如下图所示。已知Ca=100pF,Ra=∞,CF=10pF。若考虑引线电容Cc的影响,当运放开环放大倍数A0=104时,要求输出信号衰减小于1%,求采用标称电容量为90pF/m的电缆时,其最大允许长度为多大?
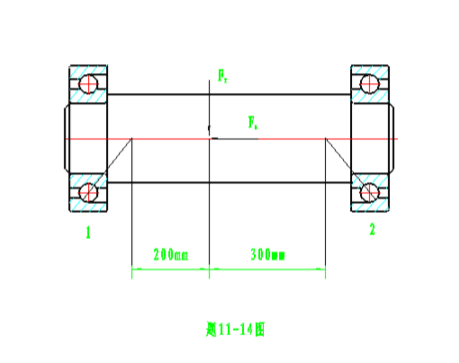
有一轴承部件,其轴承为向心角接触球轴承,安装形式及尺寸关系如下图所示。已知FR=1000N,FA=100N,内部轴向力FS=0.4F,径向动载荷系数及轴向动载荷系数分别为X=0.5,Y=1,轴承的基本额定动载荷Cr=11.2kN,温度系数ft=1,载荷系数fP=1,试求每个轴承的当量动载荷及轴承1的基本额定寿命。
已知控制系统结构图如下所示
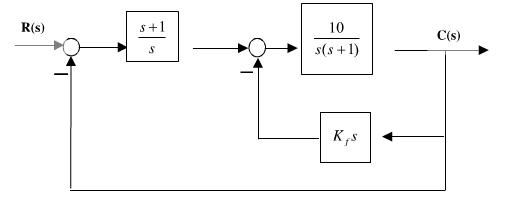
(1)分析说明内反馈Kfs的存在对稳定性的影响
(2)计算系统的静态位置误差系数、静态速度误差系数和静态加速度误差系数,并说明内反馈的存在对系统稳态误差的影响
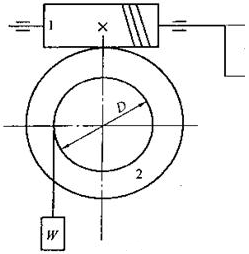
如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径d1=80mm,蜗杆头数z1=1,蜗轮齿数z2=40,卷简直径D=200mm。求:
(1)重物上升1m,手柄应转多少圈?
(2)若蜗杆与蜗轮齿面之间的当量摩擦因数fv=0.2,此机构是否自锁?
(3)标出重物上升时,蜗轮圆周力Ft2方向。
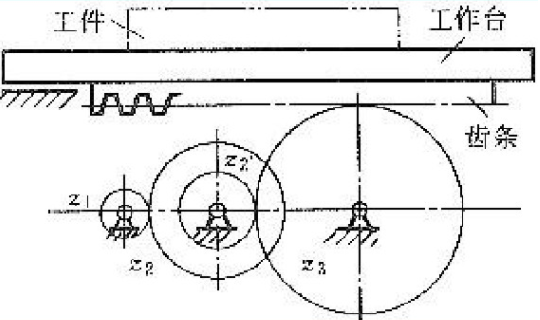
如下图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1,J2,J2',J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,求该机械系统的等效转动惯量Je(ω1/ω2=z2/z1)。
如下图所示为一机床工作台的传动系统。设已知各齿轮的齿数,齿轮3的分度圆半径r3,各齿轮的转动惯量J1,J2,J2',J3,齿轮1直接装在电动机轴上,故J1中包含了电动机转子的转动惯量;工作台和被加工零件的重量之和为G。当取齿轮1为等效构件时,求该机械系统的等效转动惯量Je(ω1/ω2=z2/z1)。

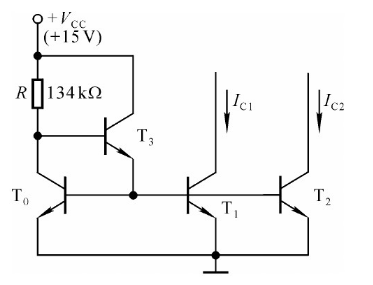
多路电流源电路如下图所示,已知所有晶体管的特性均相同,VBE均为0.7V。试求IC1、IC2各为多少。
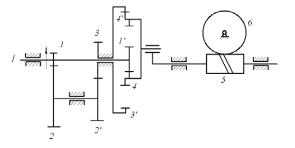
已知轮系中各齿轮齿数z1'=15,z4'=30,z4=45,z3'=60,z3=25,z2'=20,z2=25,z1=20,z2=1,z6=40,轴Ⅰ转速n1=1000r/min,转向如下图所示,求蜗轮6的转速和转向。
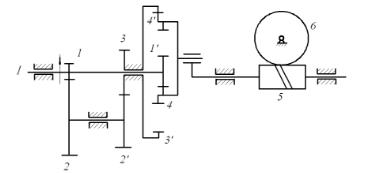
已知轮系中各轮齿数z1'=15,z4'=30,z4=45,z3'=60,z3=25,z2'=20,z2=25,z1=20,z5=1,z6=40,轴Ⅰ转速n1=1000r/min,转向如下图所示,求蜗轮6的转速和转向。