 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知单位负反馈系统的开环传递函数为,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
已知单位负反馈系统的开环传递函数为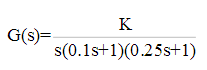 ,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知单位负反馈系统的开环传递函数为,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
如果结果不匹配,请 联系老师 获取答案
 更多“已知单位负反馈系统的开环传递函数为,试应用劳斯判据确定使系统…”相关的问题
更多“已知单位负反馈系统的开环传递函数为,试应用劳斯判据确定使系统…”相关的问题
已知单位负反馈系统开环传递函数为G(s)=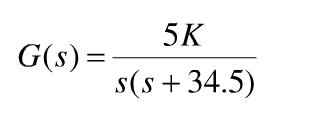 ,求k=200时,系统单位阶跃响应的动态性能指标。若k增大到k=1500或减小到k=13.5,试分析系统动态性能指标的变化情况。
,求k=200时,系统单位阶跃响应的动态性能指标。若k增大到k=1500或减小到k=13.5,试分析系统动态性能指标的变化情况。
设一单位负反馈系统的开环传递函数为G(s)=(as+1)/s²,试确定a值,使系统的相位稳定裕度等于45°。
某数控机床的位置随动系统为单位负反馈系统,其开环传递函数为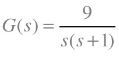 ,试计算系统的Mp,tp、ts和N。
,试计算系统的Mp,tp、ts和N。
设单位负反馈系统的开环传递函数为
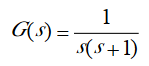 ,
,
试求系统单位阶跃响应的上升时间tr、峰值时间tp、超调量MP和调整时间ts。
设单位负反馈系统的开环传递函数为

试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭环极点分布在[s]平面的Res=-1的左侧,确定开环增益K的取值范围。
设单位负反馈系统的开环传递函数为 ,试分别求下列输入信号作用下,闭环系统的稳态输出css(t):
,试分别求下列输入信号作用下,闭环系统的稳态输出css(t):
(1)r1(t)=sin(t+30°);
(2)r2(t)=2cos(2t-45°);
(3)r3(t)=sin(t+30°)-2cos(2t-45°)。
已知稳定的单位负反馈控制系统的闭环传递函数为
试证明:系统在单位斜坡输入下的稳态误差ess=0的条件为a0=b0,a1=b1。
已知单位反馈控制系统的开环传递函数为

试分别求出当输入信号为1(t)、t·1(t)、t2·1(t)时,系统的稳态误差。
已知单位反馈系统的开环传递函数G(s)= ,当系统的输入r(t)=sin 10t时,闭环系统的稳态输出为c(t)=sin(10t-90°),试计算参数K和T的数值。
,当系统的输入r(t)=sin 10t时,闭环系统的稳态输出为c(t)=sin(10t-90°),试计算参数K和T的数值。







 ,试求:
,试求:
 ,试确定使闭环系统稳定的T和K的范围。
,试确定使闭环系统稳定的T和K的范围。









