 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
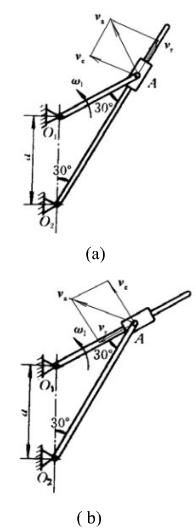
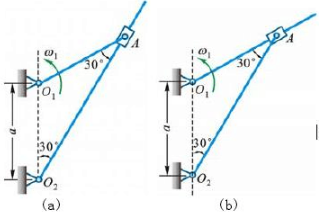
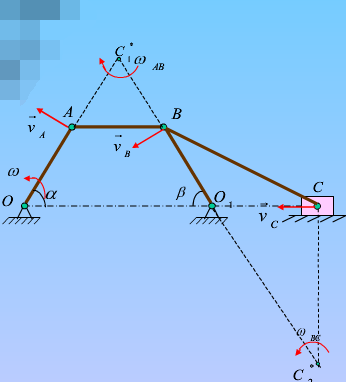
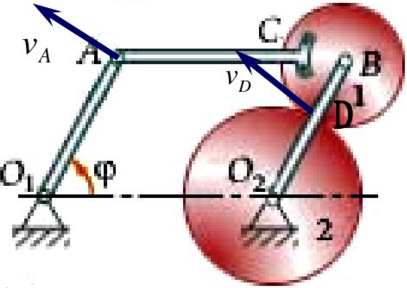
在图a、b所示的两种机构中,已知O1O2=a=200mm,ω1=3rad/s,求图示位置时杆O2A的角速度
在图a、b所示的两种机构中,已知O1O2=a=200mm,ω1=3rad/s,求图示位置时杆O2A的角速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图a、b所示的两种机构中,已知O1O2=a=200mm,ω1=3rad/s,求图示位置时杆O2A的角速度。
如果结果不匹配,请 联系老师 获取答案
 更多“在图a、b所示的两种机构中,已知O1O2=a=200mm,ω…”相关的问题
更多“在图a、b所示的两种机构中,已知O1O2=a=200mm,ω…”相关的问题
在图8-14所示的两种机构中,已知O1O2=a=200mm,ω1=3rad/s。求在图示位置时杆O2A的角速度。
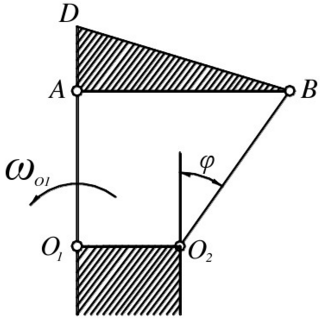
四连杆机构中,连杆AB上固连一块三角板ABD,如图9-15所示。机构由曲柄O1A带动。已知:曲柄的角速度ω0A=2rad/s;曲柄O1A=0.1m,水平距离O1O2=0.05m,AD=0.05m;当O1A⊥O1O2时,AB平行于O1O2,且AD与AO1在同一直线上;角ψ=30°。求三角板ABD的角速度和点D的速度。
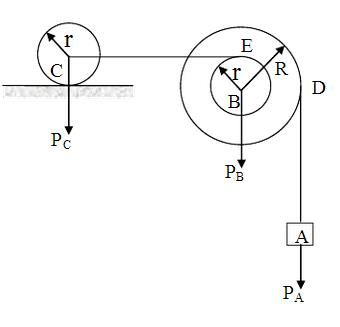
在图所示机构中,已知:匀质轮C作纯滚动,半径为r、重为PC,鼓轮B的内径为r、外径为R,对其中心轴的回转半径为ρ,重为PB,物A重为PA。绳的CE段与水平面平行,系统从静止开始运动。试求物块A下落加速度。

平面机构如图所示。已知:O1A=O2B=R=30cm,AB=O1O2,O1A按规律

在图(a)所示机构中,圆盘绕其中心O1以匀角速度ω1=3rad/s转动。当圆盘转动时,通过圆盘上的销子M1带动T型导杆沿水平往复运动。同时,在导杆AB上有一销子M2带动O2E杆绕O2轴摆动。已知:r=20cm,l=30cm。在图示位置时,θ=φ=30°。试用点的复合运动方法,求该瞬时O2E杆的角速度ω2和角加速度α2。
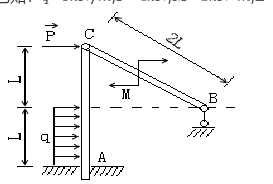
在图所示结构中,已知:P=4kN,q=3kN/m,M=2kN·m,BD=CD=2m,AC=CB=4m,θ=30°;A为固定端约束。试用虚位移原理求:
在图所示的转子中,已知各偏心质量m1=10kg,m2=15kg,m3=20kg,m4=10kg,它们的回转半径分别为r1=40cm,r2=r4=30cm,r3=20cm,方位如图所示。若置于平衡基面Ⅰ及Ⅱ中的平衡质量mbⅠ及mbⅡ的回转半径均为50cm,试求mbⅠ及ⅢmbⅡ的大小和方位(l12=l23=l34)。

1.jpg)
A.2.jpg)
B.3.jpg)
C.4.jpg)
D.5.jpg)
图示机构中齿轮1紧固在杆AC上,AB=O1O2,齿轮1和半径为r2的齿轮2啮合,齿轮2可绕O2,轴转动且和曲柄O2B没有联系。设 O1A=O2B=l,φ=bsinωt。试确定 时,轮2的角速度和角加速度。
时,轮2的角速度和角加速度。







.jpg)










