题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
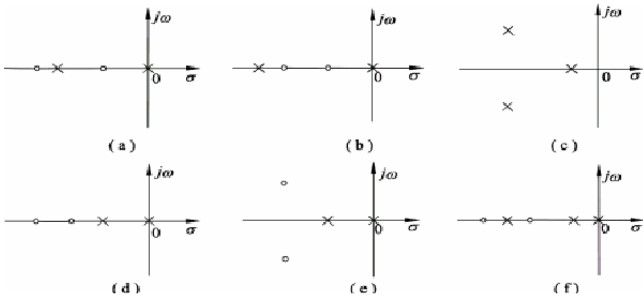
已知系统开环零极点分布如图4-22所示,试概略绘制相应的闭环根轨迹。
已知系统开环零极点分布如图4-22所示,试概略绘制相应的闭环根轨迹。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统开环零极点分布如图4-22所示,试概略绘制相应的闭环根轨迹。
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统开环零极点分布如图4-22所示,试概略绘制相应的闭环…”相关的问题
更多“已知系统开环零极点分布如图4-22所示,试概略绘制相应的闭环…”相关的问题
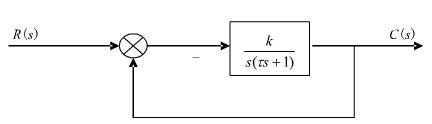
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
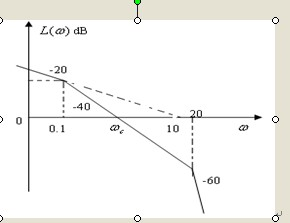
已知最小相位系统的对数幅频特性如图5-14所示。求列写系统的开环传递函数,并求出开环放大系数K与各频率间的关系。
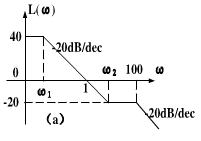
已知最小相位系统的开环对数幅频渐近特性曲线如图5-12所示。试写出系统的开环传递函数GK(s)(图中ω1、ω2、ωc均为已知)。
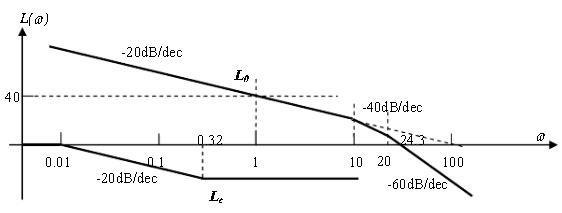
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
已知一单位反馈控制系统,其被控对象G0(s)和串联校正装置Gc(s)的对数幅频特性分别如图6-10(a)、(b)和(c)中L0和Lc所示。
(1)写出校正后各系统的开环传递函数;
(2)分析各Gc(s)对系统的作用,并比较其优缺点。

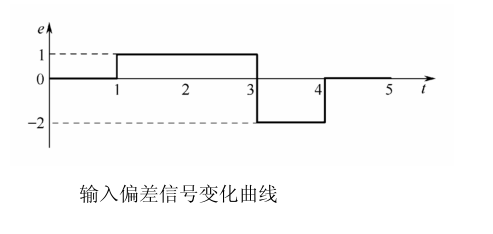
对一台比例积分控制器做开环试验。已知KP=2,T1=0.5min。若输入偏差信号如图5-1所示,试画出该控制器的输出信号变化曲线。
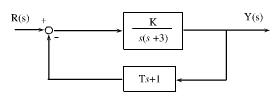
某控制系统如图4-19所示,其闭环极点为2±j√10,试确定增益K和速度反馈系数T;并对求出的T值画出根轨迹,确定使系统稳定的K值范围。
设单位负反馈系统的开环传递函数为

试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭环极点分布在[s]平面的Res=-1的左侧,确定开环增益K的取值范围。
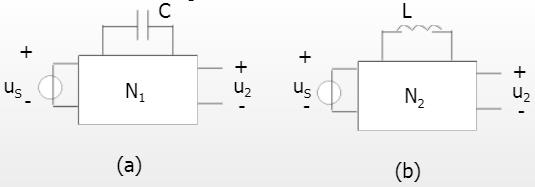
已知图(a)电路中,uS=ε(t)V,C=2F,其零状态响应为
 如果用L=2H的电感替代电容如图(b)所示,试求零状态响应u2。
如果用L=2H的电感替代电容如图(b)所示,试求零状态响应u2。