 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统函数,激励信号e(t)=e-3tu(t),试利用傅里叶分析法求响应r(t)。
已知系统函数 ,激励信号e(t)=e-3tu(t),试利用傅里叶分析法求响应r(t)。
,激励信号e(t)=e-3tu(t),试利用傅里叶分析法求响应r(t)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统函数,激励信号e(t)=e-3tu(t),试利用傅里叶分析法求响应r(t)。
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统函数,激励信号e(t)=e-3tu(t),试利用傅里…”相关的问题
更多“已知系统函数,激励信号e(t)=e-3tu(t),试利用傅里…”相关的问题
已知某线性系统幅频特性A(ω)=1/(1+0.01ω2)1/2,相频特性φ(ω)=-arctan(0.1ω),现测得某激励的稳态输出为y(t)=10sin(30t-π/2),t的单位为s。试求系统的输入信号x(t);若用该系统进行测量,要求振幅误差在5%以内,则被测信号的最高频率应控制在什么范围内?
已知信号的波形如图1所示,画出下列函数的波形。

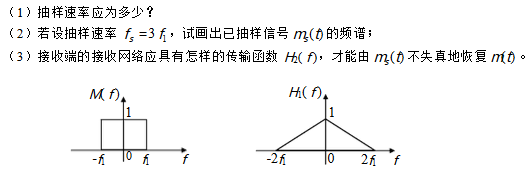
已知某信号m(t)的频谱M(f)如图所示。将它通过传输函数为H1(f)的滤波器后再进行理想抽样。
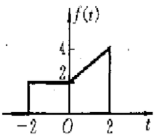
某线性时不变因果系统,已知当激励f1(t)=u(t)时,全响应为y1(t)=(3e-t+4e-2t)u(t);当激励f2(t)=2u(t)时,全响应为y2(t)=(5e-t-3e-2t)u(t)。求在相同的初始条件下,激励f3(t)波形如下图所示时的全响应y3(t)。
已知某LTI系统的微分方程为
y"(t)+5y'(t)+6f(t)=2f'(t)+8f(t)
激励信号为f(t)=e-tu(t),初始状态为y(0-)=3,y'(0-)=2,求零输入响应、零状态响应和全响应。
已知一个模拟系统的传输函数为Ha(s)=1/s,现在用双线性变换法将其变换为数字系统,设T=2。
已知一模拟滤波器的传输函数为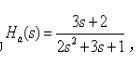 ,试分别用冲激响应不变法和双线性变换法将它转换成数字滤波器的系统函数H(z),设T=0.5。
,试分别用冲激响应不变法和双线性变换法将它转换成数字滤波器的系统函数H(z),设T=0.5。
已知系统的传递函数为 ,试求系统对正弦输入信号xi(t)=10sin(62.8t)的稳态响应。
,试求系统对正弦输入信号xi(t)=10sin(62.8t)的稳态响应。
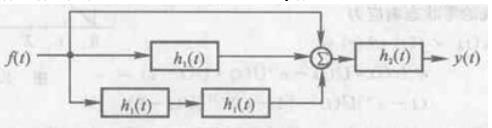
已知系统传递函数方框图如图所示,现作用于系统输入信号xi(t)=sing2t,试求系统的稳态输出。系统的传递函数如下:
已知某位置控制系统的结构图如图所示,要求计算当位置输入信号R(t)=0.5t时系统的稳态误差,并用MATLAB进行仿真分析,加以验证。








 ,求此系统的冲激响应。
,求此系统的冲激响应。









