题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=ω4且方向相反时(见题图),求机构在图示位置的瞬心及
已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=ω4且方向相反时(见题图),求机构在图示位置的瞬心及M点的速度(大小及方向)。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=ω4且方向相反时(见题图),求机构在图示位置的瞬心及M点的速度(大小及方向)。
如果结果不匹配,请 联系老师 获取答案
 更多“已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=…”相关的问题
更多“已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=…”相关的问题
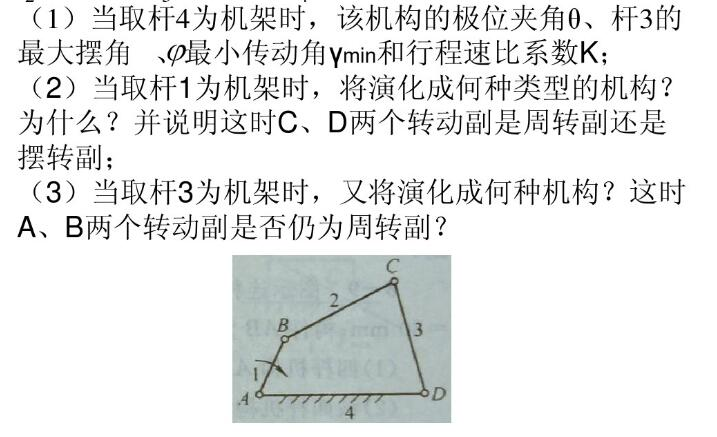
在下图所示铰链四杆机构中,已知各杆长度lAB=42mm,lBC=78mm,lCD=75mm,lAD=108mm。要求
(1) 试确定该机构为何种机构;
(2) 若以构件AB为原动件,试用作图法求出摇杆CD的最大摆角ϕ,
此机构的极位夹角θ,并确定行程速比系数K
(3) 若以构件AB为原动件,试用作图法求出该机构的最小传动角
γmin;
(4) 试分析此机构有无死点位置。
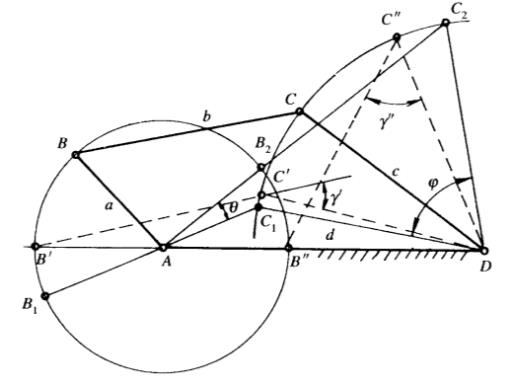
如图所示,现欲设计一铰链四杆机构,设已知摇杆CD的长lCD=75mm,行程速比系数K=1.5,机架AD的长度为lAD=100mm,摇杆的一个极限位置与机架间的夹角为 ,试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
,试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
在图所示的铰链四杆机构中,各杆的长度为l1=28mm,l2=52mm,l3=50mm,l4=72mm,试求:
现欲设计一四杆机构翻书器。如图所示,当踩动脚踏板时,连杆上的M点自M1移至M2,就可翻过一页书。现已知固定铰链A、D的位置,连架杆AB的长度及三个位置,以及描点M的三个位置。试设计该四杆机构(压重用以保证每次翻书时只翻过一页)。
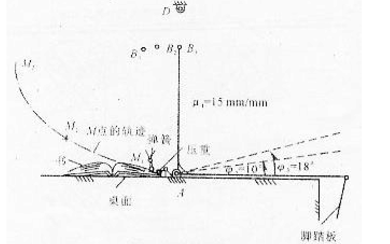
设计一摆动导杆机构,已知摆动导杆机构的机架长度d=450mm,行程速比系数K=1.40(比例尺μL=13mm/mm)。
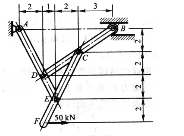
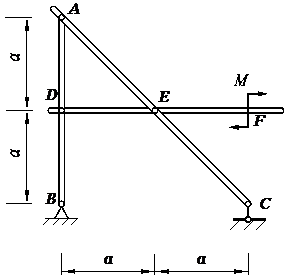
构架由杆AB、AC和DF铰接而成,如图3-25所示,在杆DF上作用一力偶矩为M的力偶,不计各杆的重量。求杆AB上铰链A、D和B所受的力。
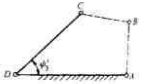
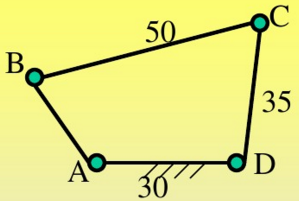
图(a)所示铰链四杆机构中,已知lBC=50mm,lDC=35mm,lAD=30mm,试求:
在图所示铰链四杆机构中,已知lBC=500mm,lCD=350mm,lAD=300mm,AD为机架。试问:
若此机构为双摇杆机构,求lAB的范围。
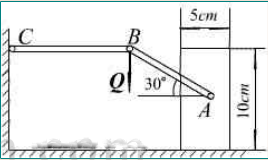
中心。已知杆BC水平,长方体与水平面间的静摩擦系数为f=0.52。各杆重及铰链处摩擦均忽略不计,尺寸如图所示。试确定不致破坏系统平衡时Q力的最大值。
如图所示,计算下列机构的自由度,并确定其机构类型。

(2)(a)图中滑块2、3分别与1、4杆移动副连接,滑块2、3之间转动副连接,此处有三个低副,无复合铰链;(b)图中十字滑块1分别与2、3构件以移动副连接。
如图3-31所示,用三根杆连接成一构架,各连接点均为铰链,B处接触表面光滑,不计各杆的重量。图中尺寸单位为m。求铰链D所受的力。