题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
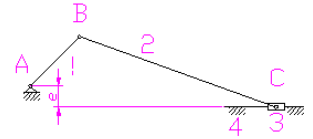
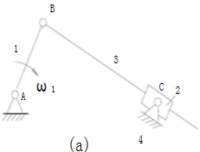
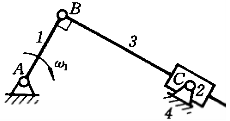
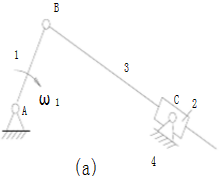
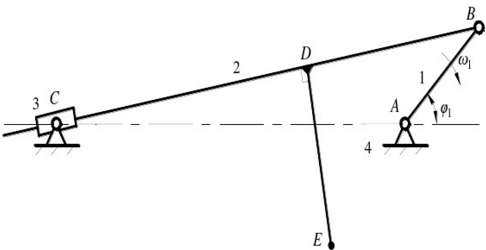
在图所示的机构中,已知原动件1为等角速度ω1=10rad/s逆时针方向转动,lAB=100mm,lBC=300mm,e=30mm。当φ1=50°、22°
在图所示的机构中,已知原动件1为等角速度ω1=10rad/s逆时针方向转动,lAB=100mm,lBC=300mm,e=30mm。当φ1=50°、22°时,试用矢量解析法求构件2的转角θ2、角速度ω2和角加速度α2,构件3的速度v3和加速度a3。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“在图所示的机构中,已知原动件1为等角速度ω1=10rad/s…”相关的问题
更多“在图所示的机构中,已知原动件1为等角速度ω1=10rad/s…”相关的问题

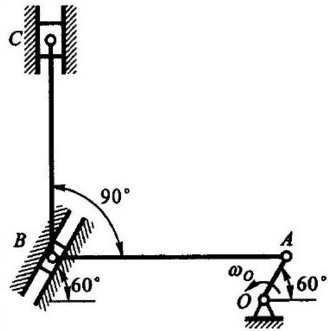
 求图示位置时,滑块C的速度和加速度。
求图示位置时,滑块C的速度和加速度。