题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
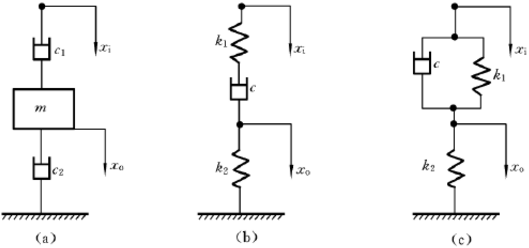
如图2-34所示机械位移系统,位移x为输入,位移y为输出,试分别求各系统的微分方程和传递函数。
如图所示机械位移系统,位移 为输入,位移
为输入,位移 为输出,试分别求各系统的微分方程和传递函数。
为输出,试分别求各系统的微分方程和传递函数。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如图所示机械位移系统,位移为输入,位移为输出,试分别求各系统的微分方程和传递函数。
如果结果不匹配,请 联系老师 获取答案
 更多“如图2-34所示机械位移系统,位移x为输入,位移y为输出,试…”相关的问题
更多“如图2-34所示机械位移系统,位移x为输入,位移y为输出,试…”相关的问题
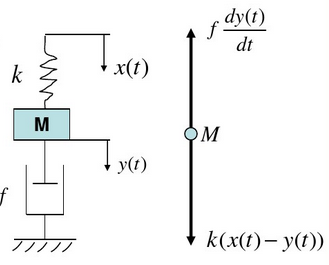
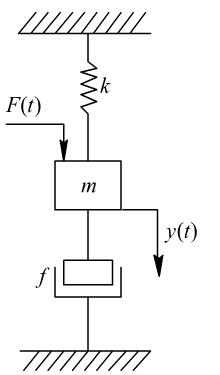
设具有弹簧、质量、阻尼器的机械位移系统如图2-4所示,F(t)为外作用力,y(t)为质量块m的位移,试求其传递函数
设具有弹簧、质量、阻尼器的机械位移系统如图2-4所示,F(t)为外作用力,y(t)为质量块m的位移,试写出外力F(t)与质量块m的位移y(t)之间的微分方程。
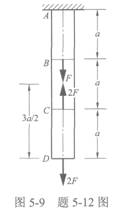
如图5-9所示等直杆,杆长为3a,材料的拉压刚度为EA,受力如图示。问杆中点横截面的铅垂位移为()。

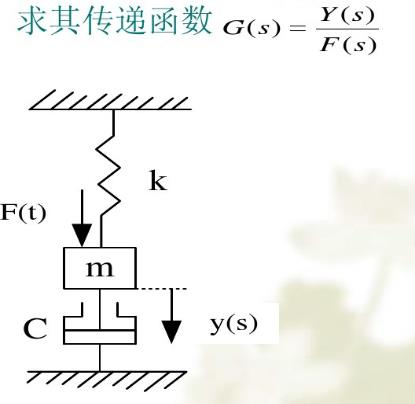
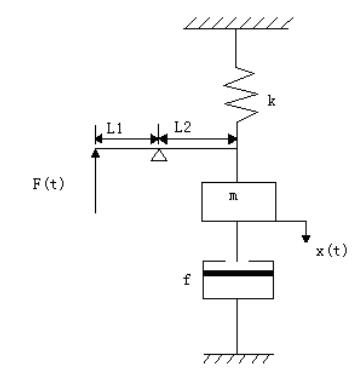
试求下图所示机械系统的微分方程式和传递函数。图中力f(t)是输入量,位移x(t)为输出量,m为质量,k为弹簧的弹性系数,B为粘性阻尼系数。
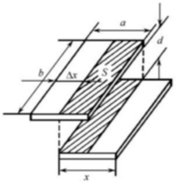
平板式电容位移传感器如下图所示。已知极板尺寸a=b=4mm,间隙d0=0.5mm,极板间介质为空气。求该传感器的静态灵敏度。若极板沿x方向移动2mm,求此时的电容量。
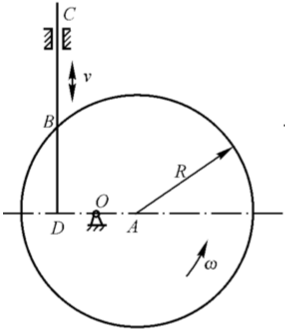
一偏置直动尖顶推杆盘形凸轮机构如图(a)所示。已知凸轮为一偏心圆盘,圆盘半径R=30mm,几何中心为A,回转中心为0,推杆偏距 凸轮以等角速度ω逆时针方向转动。当凸轮在图示位置,即AD⊥CD时,试求:(1)凸轮的基圆半径r0;
凸轮以等角速度ω逆时针方向转动。当凸轮在图示位置,即AD⊥CD时,试求:(1)凸轮的基圆半径r0;
(2)图示位置的凸轮机构压力角α; (3)图示位置的凸轮转角φ;
(4)图示位置的推杆的位移s;
(5)该凸轮机构中的推杆偏置方向是否合理,为什么?
求图4-10(a)所示结构,欲使E点的竖向位移△EV=0,则铰C的位置x应在何处?EI=常数。

对如图所示的机械若不考虑重力对系统的作用,试列写该系统以拉力f为输入,以质量块M1和M2的位移y1和y2为输出的状态空间表达式。

试用矩阵位移法计算图11-7所示桁架,要求列出求结点1位移u1,v1的刚度方程即可。已知EA为常数。

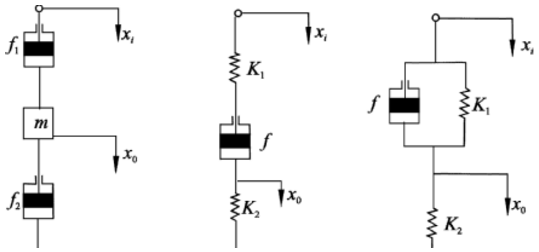
试求下图所示机械系统的微分方程式和传递函数。图中位移xi为输入量,位移xo为输出量,k为弹性系数,B、B1、B2为粘性阻尼系数。