题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统如图3-5所示,图中,引入K0和KH的目的是,使调节时间ts减小为原来的1/10,且保证总放大系数不变,试选择
已知传递函数 ,引入K0和KH的目的是,使调节时间ts减小为原来的1/10,且保证总放大系数不变,试选择K0和KH的值。
,引入K0和KH的目的是,使调节时间ts减小为原来的1/10,且保证总放大系数不变,试选择K0和KH的值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知传递函数,引入K0和KH的目的是,使调节时间ts减小为原来的1/10,且保证总放大系数不变,试选择K0和KH的值。
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统如图3-5所示,图中,引入K0和KH的目的是,使调节…”相关的问题
更多“已知系统如图3-5所示,图中,引入K0和KH的目的是,使调节…”相关的问题
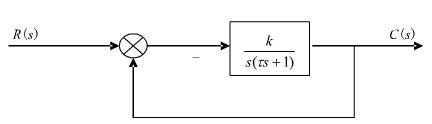
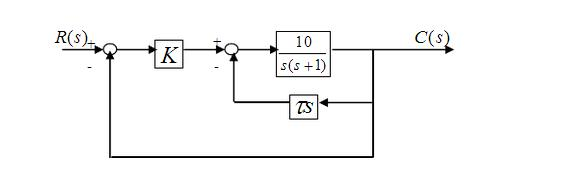
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
已知控制系统结构图如图5-74所示。
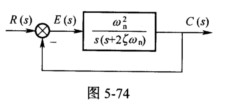 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
已知控制系统的框图如图3-15所示。要求系统的单位阶跃响应c(t)具有最大超调σ%=16.3%和峰值时间tp=1(s)。试确定前置放大器的增益K及局部反馈系数τ。
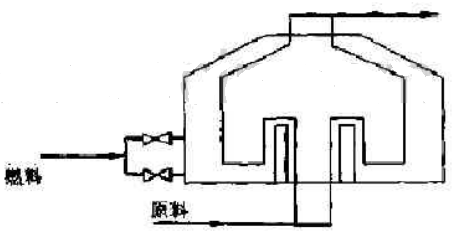
某加热炉系统如图11-7所示,工艺要求介质出口物料的温度稳定,无余差,已知燃料人口的压力波动频繁,是该控制系统的主要干扰。试根据上述要求设计一个温度控制系统,画出控制系统原理图和方块图,确定控制阀的作用形式,选择合适的控制规律和控制器正、反作用。
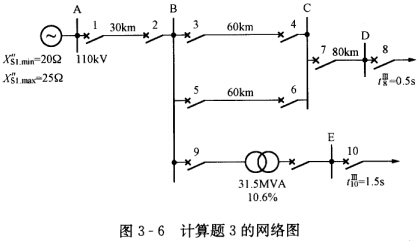
如图3-6所示网络中,各线路均装有距离保护,试对点1处的距离保护Ⅰ、Ⅱ、Ⅲ段进行整定计算,即求各段动作阻抗ZⅠop1、ZⅡop1、ZⅢop1,和动作时限tⅠ1、tⅡ1、tⅢ1,并校验其灵敏系数,即求ιp.min%,KⅡS.max、KⅢS.max。已知线路AB最大负荷电流IL.min=350A,cosφ=0.9,所有线路阻抗Z1=0.4Ω/km,阻抗角φL=70°,自启动系数Kss=1,正常时,母线最低电压UM.max=0.9UN,其他数据已注在图中。
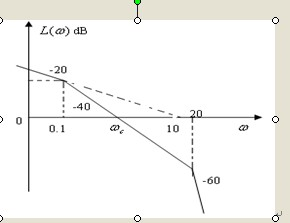
已知最小相位系统的对数幅频特性如图5-14所示。求列写系统的开环传递函数,并求出开环放大系数K与各频率间的关系。
已知如图4-18所示,求入瞳位置及物体在无穷远处时系统的最大极限视场,标出物方视场角ωm。
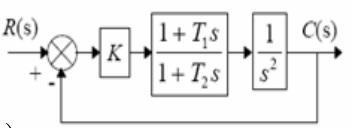
已知单位反馈系统结构图如图6-30所示,其中K为前向增益, 为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
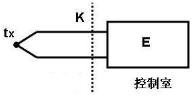
测温系统如图3-17所示。请说出这是工业上用的哪种温度计?已知热电偶的分度号为K,但错用与E配套的显示仪表,当仪表指示为160℃时,请计算实际温度tx为多少度?(室温为25℃)
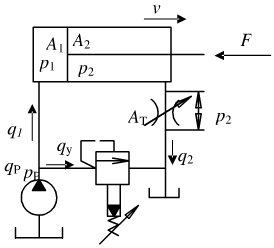
如图6-23b所示的回油节流调速回路,已知液压泵的供油流量qp=25L/min,负载F=40000N,溢流阀调定压力pp=5.4MPa,液压缸无杆腔面积A1=80×10-4m2,有杆腔面积A2=40×10-4m2,液压缸工进速度v=0.18m/min,不考虑管路损失和液压缸的摩擦损失,试计算:
1) 液压缸工进时液压系统的效率。
2) 当负载F=0时,活塞的运动速度和回油的压力。
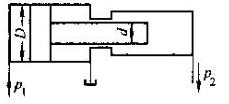
液压缸如图3-5所示,输入压力为p1,活塞直径为D,柱塞直径为d,试求输出压力p2为多大?