

 如果结果不匹配,请
如果结果不匹配,请 
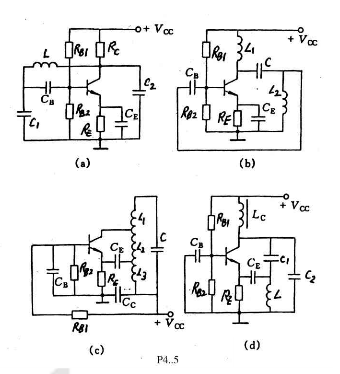
 更多“画出题图各电路的高频等效电路。根据振荡器相位平衡条件的判断准…”相关的问题
更多“画出题图各电路的高频等效电路。根据振荡器相位平衡条件的判断准…”相关的问题

如题图所示为香皂包装机中所使用的凸轮—连杆组合机构。凸轮1-1'为原动件,从M点输出复杂轨迹。试分析该机构的组合方式,并画出其组合方式的运动框图。

如题图4-3所示,双缝夫朗和费衍射实验中,在双缝的一个缝前贴一块厚
0.001mm、折射率为1.5的玻璃片。设双缝间距为1.5μm,缝宽0.5μm,用波长500nm的
平行光以i角入射。问:当i角为何值时,干涉的零级谱线仍然在x轴上,哪级干涉条纹在
衍射的主极大位置上,画出该双缝的夫朗和费衍射图样(图中注明干涉条纹的级次)。
已知题图所示卷扬机减速器中各轮齿数(图中括号内数字),内齿轮7做在卷筒的内表面上。求传动比i17(=n1/n7)。



如题图所示,设计一脚踏轧棉机的曲柄摇杆机构。OAOB在铅垂线上,要求踏板OBB在水平位置上下各摆动10°,且lOBB=500mm,lOAOB=1000mm。用图解法求曲柄OAA和连杆AB的长度。

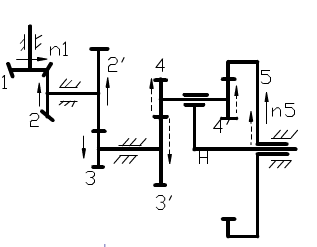
已知图示机构中各轮齿数,Z1=Z3=Z4=20,Z2=24,Z2'=Z3'=40,Z4'=30,Z5=90。n1=n5=1440r/min,方向如题图所示。求nH的大小和方向。
已知一铰链五杆机构的各杆长度,杆1和杆4均为主动件,当ω1=ω4且方向相反时(见题图),求机构在图示位置的瞬心及M点的速度(大小及方向)。

如题图所示,搬运器机构各构件尺寸为:lAB=lED=200mm、lBC=lCD=lEF=400mm,在图示位置时φ1=φ23=φ3=90°。设滑块5上作用一常力F5=2000N。现以构件1为等效构件,求由F5所形成的等效力矩Mv,并作出Mv-φ1曲线,φ1是构件1的位置角。

如题图所示已知主动件2的角速度ω2(ω2为常数),用速度和加速度多边形法求构件3、4的角速度、角加速度和构件4上各点的速度和加速度(不考虑比例尺的具体大小)。

















