 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
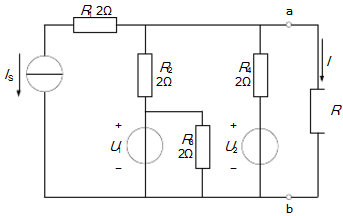
电路如图2-72所示,当R=4Ω时,I=2A。求当R=9Ω时,I等于多少?
电路如图2-72所示,当R=4Ω时,I=2A。求当R=9Ω时,I等于多少?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
电路如图2-72所示,当R=4Ω时,I=2A。求当R=9Ω时,I等于多少?
如果结果不匹配,请 联系老师 获取答案
 更多“电路如图2-72所示,当R=4Ω时,I=2A。求当R=9Ω时…”相关的问题
更多“电路如图2-72所示,当R=4Ω时,I=2A。求当R=9Ω时…”相关的问题
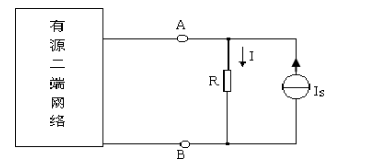
图2-90(a)所示为有源二端网络,它的开路电压Uab=24V。当有源二端网络ab间外接一个8Ω电阻时,通过此电阻的电流是2.4A。如改接成如图2-90(b)所示电路,计算通过电阻R支路的电流。已知R=2.5Ω,Is=6A。
如图(a)所示为一已充电到的电容器对电阻放电的电路,当电阻分别为1 kΩ,6kΩ,3 kΩ和4kΩ时得到四条uc(t)曲线,如图(b)所示,其中对4 kΩ电阻放电的uc(t)曲线是 ()。
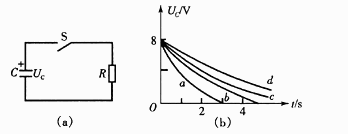
(A) 曲线a
(B) 曲线b
(C) 曲线c
(D) 曲线d
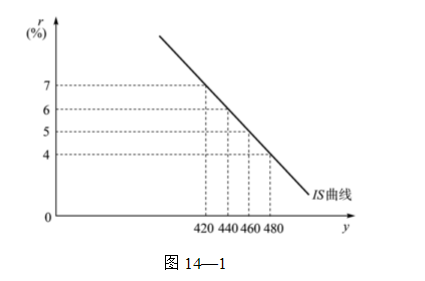
(1)若投资函数I=100-5r,找出利率r为4、5、6、7时的投资量;
(2)若储蓄函数为S=-40+0.25Y,找出与上述投资相均衡的收入水平;
(3)求IS曲线并做出图形,如图14.7所示。
单位:亿美元,%
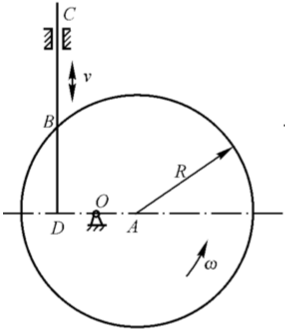
一偏置直动尖顶推杆盘形凸轮机构如图(a)所示。已知凸轮为一偏心圆盘,圆盘半径R=30mm,几何中心为A,回转中心为0,推杆偏距 凸轮以等角速度ω逆时针方向转动。当凸轮在图示位置,即AD⊥CD时,试求:(1)凸轮的基圆半径r0;
凸轮以等角速度ω逆时针方向转动。当凸轮在图示位置,即AD⊥CD时,试求:(1)凸轮的基圆半径r0;
(2)图示位置的凸轮机构压力角α; (3)图示位置的凸轮转角φ;
(4)图示位置的推杆的位移s;
(5)该凸轮机构中的推杆偏置方向是否合理,为什么?
已知控制系统结构图如图3-22所示,要求:

(1)当r(t)=2t2时,essr(∞)≤0.1,
(2)当f(t)=t时,essf(∞)≤0.1,
试确定K1的值。
已知控制系统结构图如图5-74所示。
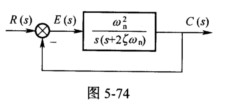 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
晶体管单管放大电路如图(a)所示,其中电阻RB可调,当输入ui、输出uo。的波形如图(b)所示时,输出波形()。
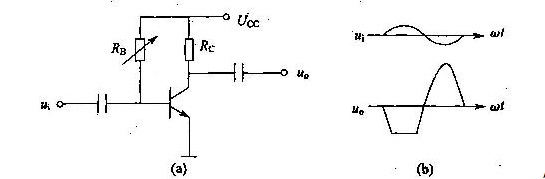
A.出现了饱和失真,应调大RB
B.出现了饱和失真,应调小RB
C.出现了截止失真,应调大RB
D.出现了截止失真,应调小RB
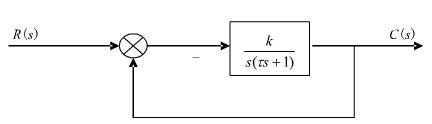
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
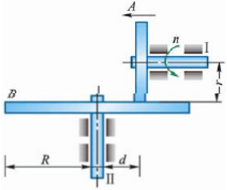
如图7-9所示,摩擦传动机构的主动轴Ⅰ的转速为n=600r/min。轴Ⅰ的轮盘与轴Ⅱ的轮盘接触,接触点按箭头A所示的方向移动。距离d的变化规律为d=100-5t,其中d以mm计,t以s计。已知r=50mm,R=150mm。以距离d表示轴Ⅱ的角加速度;当d=r时,轮B边缘上一点的全加速度。
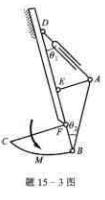
挖土机挖掘部分示意如图15-3所示。支臂DEF不动,A、B、D、E、F为铰链,液压油缸AD伸缩时可通过连杆AB使挖斗BFC绕F转动,EA=FB=r。当θ1=θ2=θ=30°时杆AE⊥DF,此时油缸推力为F。不计构件重量,求此时挖斗可克服的最大阻力矩M。
如图所示,在R,L,C元件串联电路中,施加正弦电压u,当XL>Xc时,电压u与i的相位关系应是μ()
.jpg)
A.超前于i
B.滞后于i
C.与i反相
D.与i同相

















