题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
下图所示同一结构的两种状态,根据位移互等定理下列式子正确的是()
下图所示同一结构的两种状态,根据位移互等定理下列式子正确的是()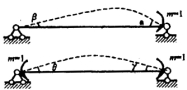
A.α=γ+θ
B.α=θ
C.γ=α+β
D.θ+γ=α+β
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
下图所示同一结构的两种状态,根据位移互等定理下列式子正确的是()
A.α=γ+θ
B.α=θ
C.γ=α+β
D.θ+γ=α+β
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示同一结构的两种状态,根据位移互等定理下列式子正确的是…”相关的问题
更多“下图所示同一结构的两种状态,根据位移互等定理下列式子正确的是…”相关的问题
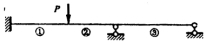
下图所示同一等截面简支梁的三种受力状态,(a)梁中点截面转角等于 ()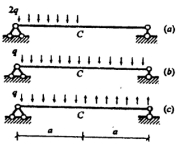
A.(b)梁中点截面转角
B.(b)梁中点截面转角2倍
C.(c)梁中点截面转角
D.(c)梁中点截面转角2倍
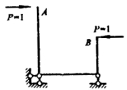
下图所示虚拟力状态可求出什么? ()
A.A、B两截面的相对位移
B.A、B两截面的相对转角
C.A、B两截面相对转动的m倍
D.A、B两点连线的转动
下列关于下图所示结构位移法基本未知量的论述,正确的是 ()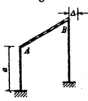
A.三个基本未知量θA、θB、△
B.两个基本未知量θA=θB,△
C.θA=θB=0,只有一个未知量△
D.θA=θB=△/a,只有一个未知量△
现有一只量程为0~20mm的电容式位移传感器,其结构如下图所示。已知L=25mm,r1=6mm,r2=5.7mm,r=4.5mm,B与C之间构成固定电容CF,A与C之间的电。容Cx随活动导杆D的位移量x而变化,拟采用理想运放。

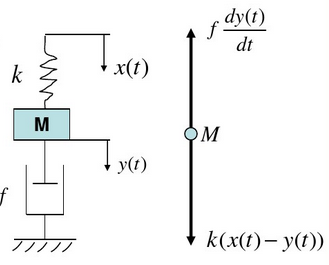
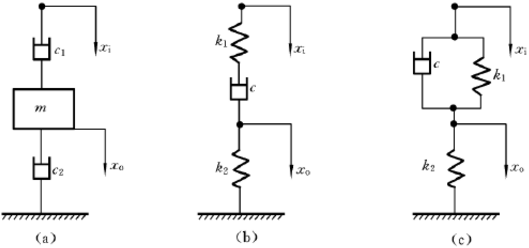
试求下图所示机械系统的微分方程式和传递函数。图中位移xi为输入量,位移xo为输出量,k为弹性系数,B、B1、B2为粘性阻尼系数。
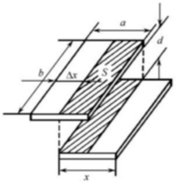
平板式电容位移传感器如下图所示。已知极板尺寸a=b=4mm,间隙d0=0.5mm,极板间介质为空气。求该传感器的静态灵敏度。若极板沿x方向移动2mm,求此时的电容量。
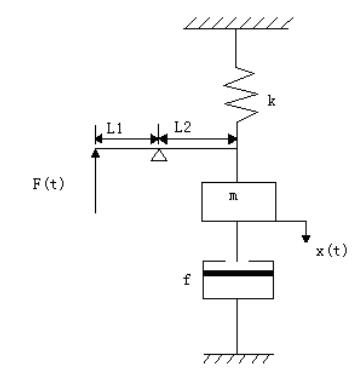
试求下图所示机械系统的微分方程式和传递函数。图中力f(t)是输入量,位移x(t)为输出量,m为质量,k为弹簧的弹性系数,B为粘性阻尼系数。