题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
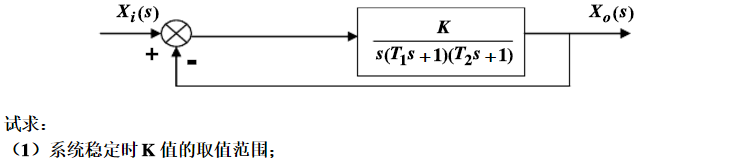
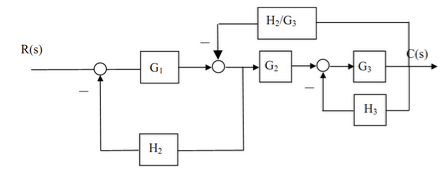
已知控制系统方框图如图所示,试通过结构图等效变换求系统传递函数C(s)/R(s)
已知控制系统方框图如图所示,试通过结构图等效变换求系统传递函数C(s)/R(s)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知控制系统方框图如图所示,试通过结构图等效变换求系统传递函数C(s)/R(s)
如果结果不匹配,请 联系老师 获取答案
 更多“已知控制系统方框图如图所示,试通过结构图等效变换求系统传递函…”相关的问题
更多“已知控制系统方框图如图所示,试通过结构图等效变换求系统传递函…”相关的问题
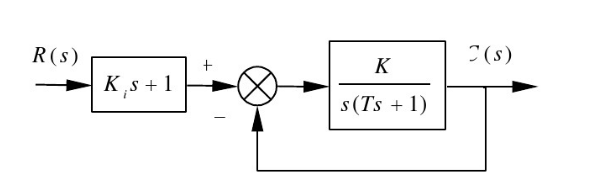
随动控制系统的方框图如图所示。若输入信号为r(t)=at(a为任意常数)。试证明通过适当地调节Ki的值,该系统对于斜坡输入的响应的稳态误差能达到零。
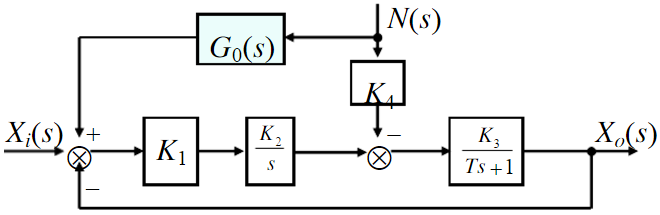
控制系统方框图如图所示,试求在输入xi(t)和扰动n(t)作用下的传递函数Xo(s)/Xi(s)和Xo(s)/N(s)。
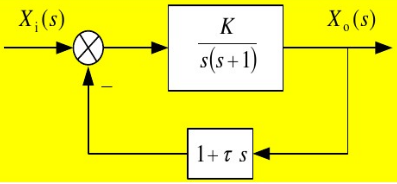
控制系统方框图如图所示。若要求系统单位阶跃响应超调量MP=20%,调整时间ts≤1.5s(△=5%),试确定K与τ的值。
已知系统传递函数方框图如图所示,现作用于系统输入信号xi(t)=sing2t,试求系统的稳态输出。系统的传递函数如下:
已知控制系统结构图如图3-22所示,要求:

(1)当r(t)=2t2时,essr(∞)≤0.1,
(2)当f(t)=t时,essf(∞)≤0.1,
试确定K1的值。
已知控制系统结构图如图5-74所示。
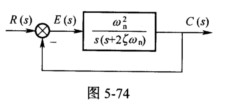 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
设已知描述某控制系统的运动方程组如下
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
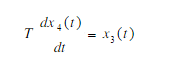 (4)
(4)
x5(t)=x4(t)-K2n2(t) (5)
 (6)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
已知控制系统结构图如下所示
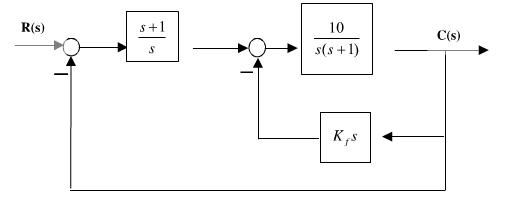
(1)分析说明内反馈Kfs的存在对稳定性的影响
(2)计算系统的静态位置误差系数、静态速度误差系数和静态加速度误差系数,并说明内反馈的存在对系统稳态误差的影响