 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统的差分方程为 y(k)-5y(k-1)+6y(k-2)=f(k) 求系统的单位阶跃响应g(k)。
已知系统的差分方程为
y(k)-5y(k-1)+6y(k-2)=f(k)
求系统的单位阶跃响应g(k)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统的差分方程为
y(k)-5y(k-1)+6y(k-2)=f(k)
求系统的单位阶跃响应g(k)。
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统的差分方程为 y(k)-5y(k-1)+6y(k-2…”相关的问题
更多“已知系统的差分方程为 y(k)-5y(k-1)+6y(k-2…”相关的问题
已知甲醇(1)-乙腈(2)系统的Wilson方程交互作用能量参数
g12-g11=2111.45J·mol-1,g21-g22=823.75J·mol-1
纯组分的摩尔体积与Antoine方程如下:
V1=40.73 cm3·mol-1,V2=66.30 cm3·mol-1


已知生产函数为(1)Q=5L⅓K⅔ (2)Q=KL/(K+L) (3)Q=kL2 (4)Q=min{3L,K} 求(1)厂商长期生产的扩展线方程。 (2)当PL=1,Pk=1,Q=1000时,厂商实现最小成本的要素投入组合
已知液体质点的运动,由欧拉变数表示为ux=kx,uy=-ky,uc=0,式中k为常数。试求液体质点的加速度和流线方程。
已知单位负反馈系统开环传递函数为G(s)=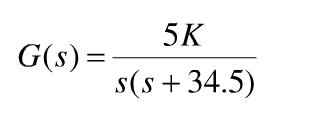 ,求k=200时,系统单位阶跃响应的动态性能指标。若k增大到k=1500或减小到k=13.5,试分析系统动态性能指标的变化情况。
,求k=200时,系统单位阶跃响应的动态性能指标。若k增大到k=1500或减小到k=13.5,试分析系统动态性能指标的变化情况。
已知某LTI离散时间系统,当输入为δ(k-1)时,系统的零状态响应为
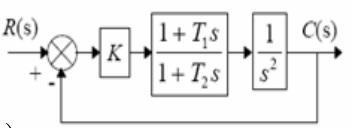
已知单位反馈系统结构图如图6-30所示,其中K为前向增益,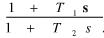 为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
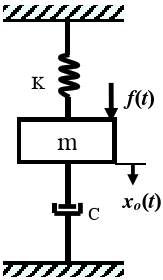
由质量、弹簧、阻尼器组成的机械系统如图所示。已知,m=1kg,k为弹簧的刚度,c为阻尼系统。若外力f(t)=2sin2tN,由实验得到系统稳态响应为 ,试确定k和c。
,试确定k和c。









 ,试确定使闭环系统稳定的T和K的范围。
,试确定使闭环系统稳定的T和K的范围。 试用劳斯判据确定使闭环系统稳定的K的取值范围。
试用劳斯判据确定使闭环系统稳定的K的取值范围。









