题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K应
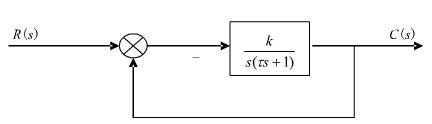
设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K应取何值,调节时间ts是多少?

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K应取何值,调节时间ts是多少?
如果结果不匹配,请 联系老师 获取答案
 更多“设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶…”相关的问题
更多“设角速度指示随动系统结构图如图3-30所示。若要求系统单位阶…”相关的问题
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
系统结构图如图3-15所示,若系统以ωn=2rad/s的频率振荡,试确定系统的K和a值。
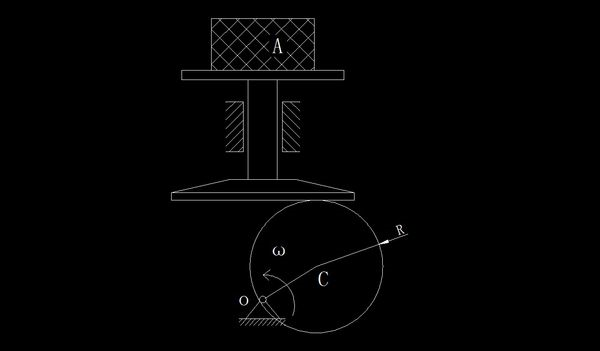
半径R为的偏心轮绕轴O以匀角速度ω转动,推动导板沿铅直轨道运动,如图10-5所示。导板顶部放有一质量为m的物块A,设偏心距OC=e,开始时OC沿水平线。求物块对导板的最大压力;使物块不离开导板的ω最大值。
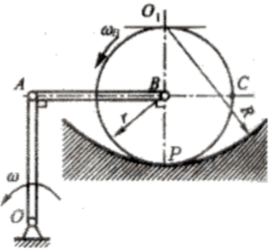
如图9-25所示,曲柄OA以恒定的角速度ω=2rad/s绕轴O转动,并借助连杆AB驱动半径为r的轮子在半径为R的圆弧槽中作无滑动的滚动。设OA=AB=R=2r=1m,求图示瞬时点B和点C的速度与加速度。
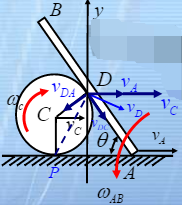
直杆AB与圆柱C相切,A点以匀速60cm/s向右滑动,如图(a)所示。圆柱在水平面上滚动,圆柱半径r=10cm。设杆与圆柱之间及圆柱与水平面之间均无滑动。试求:在图示位置θ=60°时,直杆AB以及圆柱C的角速度。
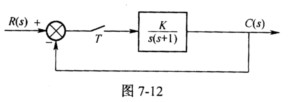
已知系统结构图如图7-12所示,T为采样周期,试画出参数K-T稳定域(取T做横坐标)曲线。
已知控制系统结构图如图5-74所示。
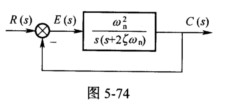 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。