题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
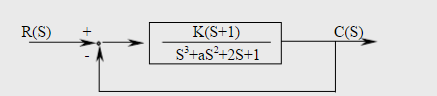
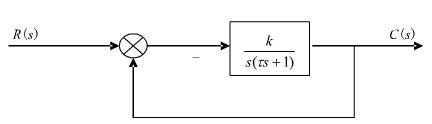
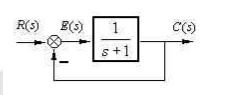
系统结构图如图3-15所示,若系统以ωn=2rad/s的频率振荡,试确定系统的K和a值。
系统结构图如图3-15所示,若系统以ωn=2rad/s的频率振荡,试确定系统的K和a值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
系统结构图如图3-15所示,若系统以ωn=2rad/s的频率振荡,试确定系统的K和a值。
如果结果不匹配,请 联系老师 获取答案
 更多“系统结构图如图3-15所示,若系统以ωn=2rad/s的频率…”相关的问题
更多“系统结构图如图3-15所示,若系统以ωn=2rad/s的频率…”相关的问题
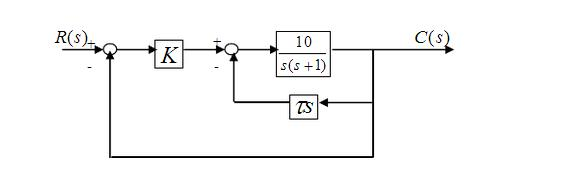
已知控制系统的框图如图3-15所示。要求系统的单位阶跃响应c(t)具有最大超调σ%=16.3%和峰值时间tp=1(s)。试确定前置放大器的增益K及局部反馈系数τ。
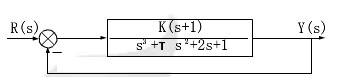
已知控制系统结构图如图5-74所示。
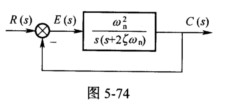 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
有一位置随动系统,结构图如图3-5所示。K=40,τ=0.1。(1)求系统的开环和闭环极点;(2)当输入量R(s)为单位阶跃函数时,求系统的自然振荡角频率ωn,阻尼比f和系统的动态性能指标tr,ts,σ%。
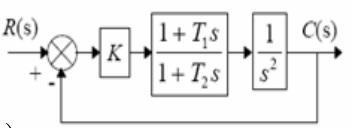
已知单位反馈系统结构图如图6-30所示,其中K为前向增益, 为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
系统的结构图如图所示。试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出和稳态误差。

电子心脏起搏器心律控制系统结构图如图3-10所示,其中模仿心脏的传递函数相当于一个纯积分环节。
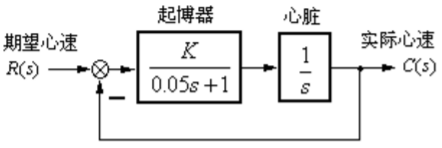
(1)若ζ=0.5对应最佳响应,问起搏器增益K应取多大?
(2)若期望心速为60次/min,并突然接通起搏器,问1s后实际心速为多少?瞬时最大心速多大?
如图3.31所示的系统,带通滤波器的频率响应如图3.31(b)所示,其相频特性ψ(ω)=0,若输入s(t)=cos1000t,求输出信号y(t)

如图4-19所示回路,顺序阀和溢流阀串联,调整压力分别为px和pY,当系统外负载为无穷大时,试问:
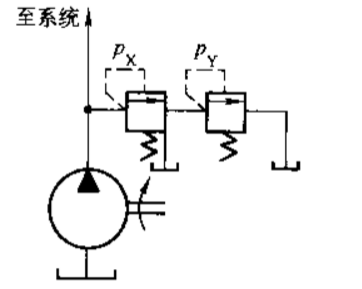
1) 液压泵的出口压力为多少?
2) 若把两阀的位置互换,液压泵的出口压力又为多少?
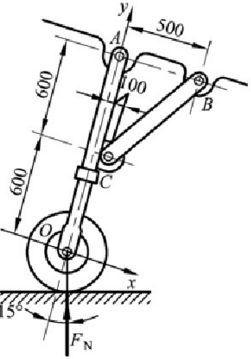
飞机起落架,尺寸如图3-15所示。A、B、C均为铰链,杆OA垂直于A、B连线。当飞机等速直线滑行时,地面作用于轮上的铅直正压力FN=30kN,水平摩擦力和各杆自重都比较小,可略去不计。求A、B两处的约束力。
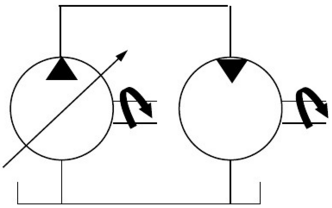
如图3-10所示系统,液压泵和液压马达的参数如下:泵的最大排量VPmax=115mL/r,转速nP=1000r/min,机械效率ηmP=0.9,总效率ηP=0.84;马达的排量VM=148mL/r,机械效率ηmM=0.9,总效率ηM=0.84,回路最大允许压力pr=8.3MPa,若不计管道损失,试求:
1) 液压马达最大转速及该转速下的输出功率和输出转矩。
2) 驱动液压泵所需的转矩。