题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
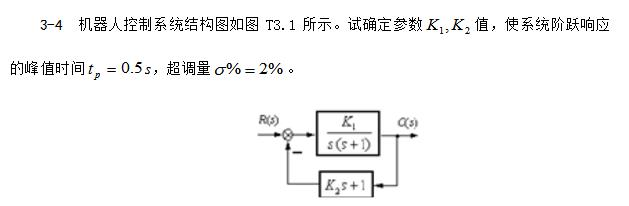
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶跃响应的峰值时间tp=0.5s,超调量σ%=2%。
如果结果不匹配,请 联系老师 获取答案
 更多“机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶…”相关的问题
更多“机器人控制系统结构如图所示。试确定参数K1,K2值,使系统阶…”相关的问题
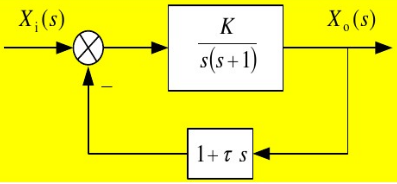
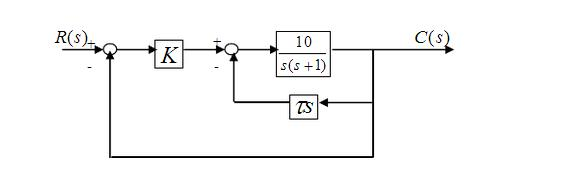
控制系统方框图如图所示。若要求系统单位阶跃响应超调量MP=20%,调整时间ts≤1.5s(△=5%),试确定K与τ的值。
某控制系统用临界比例度法整定参数。已测得δK=20%、TK=4min。试分别确定P、PI、PID作用时控制器的参数。
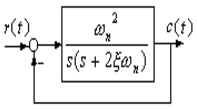
系统结构如图所示,当输入r(t)=2sint时,测得稳态输出为c(t)=4sin(t-45°)。试确定参数ζ和ωn。
某控制系统用临界比例度法整定参数,已知δK=25%,TK=5min。请分别确定PI,PID作用时的控制器参数。
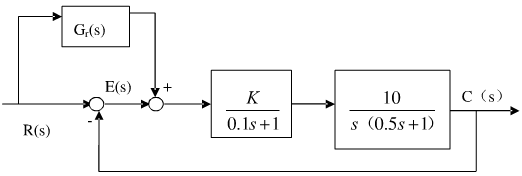
设复合控制系统如图6-37所示。若要求闭环回路处于过阻尼状态,且在单位斜坡输入作用下的稳态误差为零,试确定K值及前馈补偿装置Gc(s)。
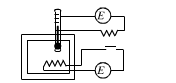
器的线圈电路中,它随着水银柱的升降而接通或断开,通过控制继电器触点K的开、闭而接通或断开电阻丝的电源,以达到自动调温的目的。试说明该系统的控制过程,并画出系统的方框图。
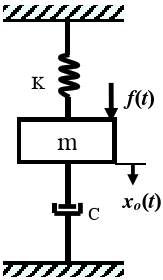
由质量、弹簧、阻尼器组成的机械系统如图所示。已知,m=1kg,k为弹簧的刚度,c为阻尼系统。若外力f(t)=2sin2tN,由实验得到系统稳态响应为 ,试确定k和c。
,试确定k和c。
已知控制系统的框图如图3-15所示。要求系统的单位阶跃响应c(t)具有最大超调σ%=16.3%和峰值时间tp=1(s)。试确定前置放大器的增益K及局部反馈系数τ。
已知控制系统结构图如图5-74所示。
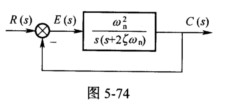 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。