 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设一阶非线性系统的微分方程为 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
设一阶非线性系统的微分方程为

试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设一阶非线性系统的微分方程为
试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
如果结果不匹配,请 联系老师 获取答案
 更多“设一阶非线性系统的微分方程为 试确定系统有几个平衡状态,分析…”相关的问题
更多“设一阶非线性系统的微分方程为 试确定系统有几个平衡状态,分析…”相关的问题
设非线性系统结构图如图所示,其中参数K1、K2、T1、T2、M均为正。试确定:

(1)系统发生自振时,各参数应满足的条件。
(2)自振频率和振幅。
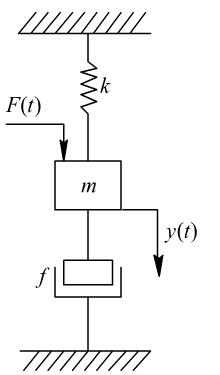
设具有弹簧、质量、阻尼器的机械位移系统如图2-4所示,F(t)为外作用力,y(t)为质量块m的位移,试写出外力F(t)与质量块m的位移y(t)之间的微分方程。
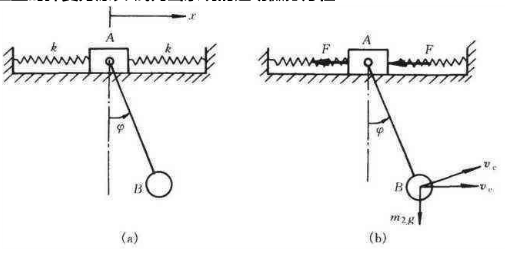
滑块A与两根完全相同的弹簧相连,滑块又铰接一单摆,如图(a)所示。设滑块A质量为m1,沿光滑水平面运动,两根弹簧刚性系数均为k。单摆摆长为l,摆锤B的质量为m2,不计摆杆质量。系统在静平衡位置时弹簧为原长。试列出系统的运动微分方程。
设一单位负反馈系统的开环传递函数为G(s)=(as+1)/s²,试确定a值,使系统的相位稳定裕度等于45°。
设单位反馈系统的开环传递函数为k(s+1)/s^3+as^2+2s+1
若系统以w=2rad/s频率持续振荡,试确定相应的K和α值。
设单位负反馈系统开环传递函数为 ,试应用劳斯稳定判据确定K为多大值时,将使系统振荡,并求出振荡频率。
,试应用劳斯稳定判据确定K为多大值时,将使系统振荡,并求出振荡频率。
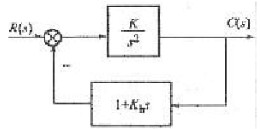
设系统结构图如下图所示。为使闭环极点位于 ,试确定增益K和速度反馈系数Kh的值,并以计算得到的K及Kh值为基准值.
,试确定增益K和速度反馈系数Kh的值,并以计算得到的K及Kh值为基准值.
设单位负反馈系统的开环传递函数为

试求:(1)使闭环系统稳定的开环增益K的取值范围;(2)若要求系统全部闭环极点分布在[s]平面的Res=-1的左侧,确定开环增益K的取值范围。
已知一阶因果离散系统的差分方程为y(n)+3y(n-1)=x(n)。试求:系统的单位冲激响应h(n)。


















